Question:-01 (a) सिद्ध कीजिए कि n\mathrm{n} विमीय सदिश समष्टि V\mathrm{V} के लिए n\mathrm{n} रैखिकत: स्वतंत्र सदिशों का कोई भी समुच्चय V\mathrm{V} के लिए एक आधार बनाता है ।
Question:-01 (a) Prove that any set of n\mathrm{n} linearly independent vectors in a vector space V\mathrm{V} of dimension n\mathrm{n} constitutes a basis for V\mathrm{V}.
Answer:
To prove that any set of nn linearly independent vectors in a vector space VV of dimension nn constitutes a basis for VV, we need to show two things:
The set spans VV.
The set is linearly independent.
Given:
A vector space VV of dimension nn.
A set S={v_(1),v_(2),dots,v_(n)}S = \{ \mathbf{v}_1, \mathbf{v}_2, \ldots, \mathbf{v}_n \} of nn linearly independent vectors in VV.
Proof:
Step 1: SS is Linearly Independent (Given)
We are given that SS is a set of nn linearly independent vectors. Therefore, no vector in SS can be written as a linear combination of the other vectors in SS.
Step 2: SS Spans VV
To show that SS spans VV, we need to show that any vector w\mathbf{w} in VV can be written as a linear combination of vectors in SS.
Let’s consider another basis BB for VV. Since VV has dimension nn, BB contains exactly nn vectors. We can write w\mathbf{w} as a linear combination of vectors in BB:
Simplifying, we find that w\mathbf{w} can indeed be written as a linear combination of vectors in SS, proving that SS spans VV.
Conclusion
Since SS is both linearly independent and spans VV, it constitutes a basis for VV.
Thus, we have proven that any set of nn linearly independent vectors in a vector space VV of dimension nn constitutes a basis for VV.
Question:-01 (b) माना T:R^(2)rarrR^(3)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^3 एक रैखिक रूपांतरण, ऐसा है कि T([1],[0])=([1],[2],[3])\mathrm{T}\left(\begin{array}{l}1 \\ 0\end{array}\right)=\left(\begin{array}{l}1 \\ 2 \\ 3\end{array}\right) तथा T([1],[1])=([-3],[2],[8])\mathrm{T}\left(\begin{array}{l}1 \\ 1\end{array}\right)=\left(\begin{array}{r}-3 \\ 2 \\ 8\end{array}\right) है । T([2],[4])\mathrm{T}\left(\begin{array}{l}2 \\ 4\end{array}\right) को ज्ञात कीजिए ।
Question:-01(b) Let T:R^(2)rarrR^(3)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^3 be a linear transformation such that T([1],[0])=([1],[2],[3])\mathrm{T}\left(\begin{array}{l}1 \\ 0\end{array}\right)=\left(\begin{array}{l}1 \\ 2 \\ 3\end{array}\right) and T([1],[1])=([-3],[2],[8])\mathrm{T}\left(\begin{array}{l}1 \\ 1\end{array}\right)=\left(\begin{array}{r}-3 \\ 2 \\ 8\end{array}\right). Find T([2],[4])\mathrm{T}\left(\begin{array}{l}2 \\ 4\end{array}\right)
Answer:
Introduction: In this problem, we are given a linear transformation T:R^(2)rarrR^(3)T: \mathbb{R}^2 \rightarrow \mathbb{R}^3 and are asked to find the image of a vector under this transformation. We are given the images of two vectors under T\mathrm{T} and will use this information along with the linearity property of the transformation to find the desired image.
Assumptions: We assume that T\mathrm{T} is a linear transformation.
Definition:
Linear Transformation: A function T:V rarr WT: V \rightarrow W between two vector spaces VV and WW is called a linear transformation if for all vectors u,v in Vu, v \in V and scalars cc, the following conditions hold:
a. T(u+v)=T(u)+T(v)T(u+v)=T(u)+T(v)
b. T(cu)=cT(u)T(c u)=c T(u)
Method/Approach: To solve this problem, we will first express the given vector as a linear combination of the two given vectors. Then, we will use the linearity property of the transformation to find the image of the given vector under the transformation T\mathrm{T}.
Work/Calculations: The calculations have already been provided in the original answer. I’ll restate them here for clarity:
Represent the vector ([2],[4])\left(\begin{array}{c}2 \\ 4\end{array}\right) as a linear combination of the given vectors:
Conclusion: In this problem, we found the image of the vector ([2],[4])\left(\begin{array}{c}2 \\ 4\end{array}\right) under the linear transformation T:R^(2)rarrR^(3)T: \mathbb{R}^2 \rightarrow \mathbb{R}^3. We expressed the given vector as a linear combination of the two given vectors and used the linearity property of the transformation to find the image.
The image of the given vector under the transformation TT is ([-14],[4],[26])\left(\begin{array}{c}-14 \\ 4 \\ 26\end{array}\right).
Question:-01(c) lim_(x rarr oo)(e^(x)+x)^((1)/(x))\lim _{x \rightarrow \infty}\left(e^x+x\right)^{\frac{1}{x}} का मान निकालिए ।
Introduction: In this problem, we are asked to evaluate the limit lim_(x rarr oo)(e^(x)+x)^((1)/(x))\lim _{x \rightarrow \infty}\left(e^x+x\right)^{\frac{1}{x}}. The expression presents an indeterminate form of type 1^(oo)1^{\infty} as xx approaches infinity. We will use the natural logarithm and L’Hôpital’s rule to resolve this indeterminate form and find the limit.
Assumptions: None.
Definition: Indeterminate form refers to an expression involving limits whose behavior cannot be determined solely based on the behavior of the individual parts of the expression.
Theorem: L’Hôpital’s Rule states that if lim_(x rarr c)(f(x))/(g(x))\lim _{x \rightarrow c} \frac{f(x)}{g(x)} is an indeterminate form of type (0)/(0)\frac{0}{0} or (oo )/(oo)\frac{\infty}{\infty}, and f^(‘)(x)f^{\prime}(x) and g^(‘)(x)g^{\prime}(x) exist and are continuous in an open interval containing cc (except possibly at cc, and lim_(x rarr c)(f^(‘)(x))/(g^(‘)(x))\lim _{x \rightarrow c} \frac{f^{\prime}(x)}{g^{\prime}(x)} exists or equals +-oo\pm \infty, then lim_(x rarr c)(f(x))/(g(x))=lim_(x rarr c)(f^(‘)(x))/(g^(‘)(x))\lim _{x \rightarrow c} \frac{f(x)}{g(x)}=\lim _{x \rightarrow c} \frac{f^{\prime}(x)}{g^{\prime}(x)}.
Method/Approach: The steps in your answer are correct, and I will restate them briefly:
Recognize the indeterminate form of type 1^(oo)1^{\infty}.
Use the natural logarithm to transform the expression.
Apply L’Hôpital’s rule to find the limit of the transformed expression.
Transform the result back using exponentiation.
State the conclusion.
Work/Calculations: Based on your provided answer, the calculations are as follows:
Recognize the indeterminate form of type 1^(oo)1^{\infty} as xx approaches infinity.
Define a new function yy and use the natural logarithm to transform the expression:
Conclusion: By recognizing the indeterminate form of type 1^(oo)1^{\infty}, using the natural logarithm to transform the expression, and applying L’Hôpital’s rule, we found that the limit of the given expression as xx approaches infinity is ee.
Question:-01(d) int_(0)^(2)(dx)/((2x-x^(2)))\int_0^2 \frac{d x}{\left(2 x-x^2\right)} की अभिसारिता का परीक्षण कीजिए ।
Question:-01(d) Examine the convergence of int_(0)^(2)(dx)/((2x-x^(2)))\int_0^2 \frac{d x}{\left(2 x-x^2\right)}.
Answer:
Introduction: In this problem, we are asked to examine the convergence of the integral int_(0)^(2)(dx)/((2x-x^(2)))\int_0^2 \frac{d x}{\left(2 x-x^2\right)}. We will determine if the integrand is continuous on the given interval, analyze the behavior of the integrand around any discontinuities, and determine if the integral converges or diverges based on the analysis.
Assumptions: None.
Definition: An improper integral is an integral where either the interval of integration is infinite, or the integrand has an infinite discontinuity within the interval.
Method/Approach: The steps in your answer are correct, and I will restate them briefly:
Determine the continuity of the integrand.
Analyze the behavior of the integrand around discontinuities.
Determine if the integral converges or diverges.
State the conclusion.
Work/Calculations: Based on your provided answer, the calculations are as follows:
Step 1: Determine the continuity of the integrand
The integrand is a rational function:
(1)/((2x-x^(2)))\frac{1}{\left(2 x-x^2\right)}
Its denominator is equal to zero when:
2x-x^(2)=02 x-x^2=0
Factor out x\mathrm{x} :
x(2-x)=0x(2-x)=0
This gives us two roots: x=0x=0 and x=2x=2. The integrand is not continuous at these points.
Step 2: Analyze the behavior of the integrand around discontinuities
Since the integral has improper bounds due to the discontinuity at x=0x=0 and x=2x=2, we will rewrite the integral as the sum of two improper integrals:
We can use the same partial fraction decomposition as before:
lim_(b rarr2^(-))(int_(0)^(b)(1)/(2x)dx+int_(0)^(b)(1)/(2(2-x))dx)\lim _{b \rightarrow 2^{-}}\left(\int_0^b \frac{1}{2x} d x+\int_0^b \frac{1}{2(2-x)} d x\right)
Upon integrating and evaluating the limits, we find that this limit also does not converge due to the divergence of ln |2-x|\ln |2-x| as b rarr2^(-)b \rightarrow 2^{-}.
Step 4: State the Conclusion
Since both limits do not converge, the original integral
The integral int_(0)^(2)(dx)/((2x-x^(2)))\int_0^2 \frac{d x}{\left(2 x-x^2\right)} does not converge due to nonintegrable singularities at x=0x = 0 and x=2x = 2.
Question:-01(e) एक चर समतल एक स्थिर बिन्दु (a,b,c)(\mathrm{a}, \mathrm{b}, \mathrm{c}) से गुज़रता है तथा अक्षों को क्रमशः A,B\mathrm{A}, \mathrm{B} व C\mathrm{C} बिन्दुओं पर मिलता है । बिन्दुओं O,A,B\mathrm{O}, \mathrm{A}, \mathrm{B} तथा C\mathrm{C} से गुज़रते हुए गोले के केन्द्र का बिन्दुपथ ज्ञात कीजिए, जहाँ O\mathrm{O} मूल-बिन्दु है ।
Question:-01(e) A variable plane passes through a fixed point (a, b, c) and meets the axes at points A, B and C respectively. Find the locus of the centre of the sphere passing through the points O,A,B\mathrm{O}, \mathrm{A}, \mathrm{B} and C,O\mathrm{C}, \mathrm{O} being the origin.
Answer:
Concept:
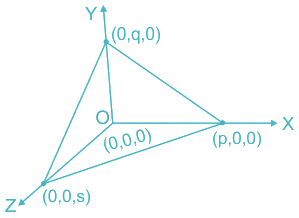
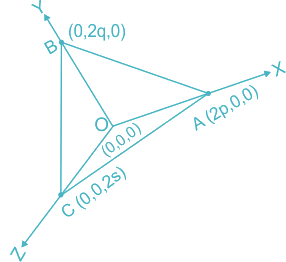
Consider a plane cut at (p,0,0)(\mathrm{p}, 0,0) on X\mathrm{X}-axis, (0,q,0)(0, q, 0) on Y\mathrm{Y}-axis, and (0,0,s)(0,0, \mathrm{~s}) on Z-axis
Then,
The general equation of a sphere is: (x-a)^(2)+(y-b)^(2)+(z-c)^(2)=r^(2)(x-a)^2+(y-b)^2+(z-c)^2=r^2
Where (a,b,c)=(a, b, c)= center of the sphere, r=r= radius, and x,yx, y, and zz are the coordinates of the points on the surface of the sphere.
Calculation:
Let, (p,q,s)=(p, q, s)= Center of sphere :.\therefore equation of a sphere =(x-p)^(2)+(y-q)^(2)+(z-s)^(2)=r^(2)=(\mathrm{x}-\mathrm{p})^2+(\mathrm{y}-\mathrm{q})^2+(\mathrm{z}-\mathrm{s})^2=\mathrm{r}^2
Now, radius of sphere (r)=sqrt((p-0)^(2)+(q-0)^(2)+(s-0)^(2))(r)=\sqrt{(p-0)^2+(q-0)^2+(s-0)^2} (distance from origin)
{:[:.r^(2)=p^(2)+q^(2)+s^(2)],[:.” equation of a sphere “=(x-p)^(2)+(y-q)^(2)+(z-s)^(2)=p^(2)+q^(2)+s^(2)],[=>x^(2)-2px+p^(2)+y^(2)-2qy+q^(2)+z^(2)-2zs+s^(2)=p^(2)+q^(2)+s^(2)],[=>x^(2)+y^(2)+z^(2)-2px-2qy-2zs=0=>]:}\begin{aligned}
& \therefore \mathrm{r}^2=\mathrm{p}^2+\mathrm{q}^2+\mathrm{s}^2 \\
& \therefore \text { equation of a sphere }=(\mathrm{x}-\mathrm{p})^2+(\mathrm{y}-\mathrm{q})^2+(\mathrm{z}-\mathrm{s})^2=\mathrm{p}^2+\mathrm{q}^2+\mathrm{s}^2 \\
& \Rightarrow \mathrm{x}^2-2 \mathrm{px}+\mathrm{p}^2+\mathrm{y}^2-2 \mathrm{qy}+\mathrm{q}^2+\mathrm{z}^2-2 \mathrm{zs}+\mathrm{s}^2=\mathrm{p}^2+\mathrm{q}^2+\mathrm{s}^2 \\
& \Rightarrow \mathrm{x}^2+\mathrm{y}^2+\mathrm{z}^2-2 \mathrm{px}-2 \mathrm{qy}-2 \mathrm{zs}=0 \Rightarrow
\end{aligned}
Now, we will find point of intersection on XX – axis, so y=0,z=0y=0, z=0,
The problem is to find all solutions to the given system of linear equations using the row-reduced echelon form (RREF) method. The system of equations is:
Question:-02(b) एक ll लम्बाई के तार को दो भागों में काटकर क्रमशः एक वर्ग तथा एक वृत्त के रूप में मोड़ा गया है । लग्रांज की अनिर्धारित गुणक विधि का प्रयोग करके, इस तरह से प्राप्त किए गए क्षेत्रफलों के योगफल का न्यूनतम मान ज्ञात कीजिए ।
Question:-02(b) A wire of length ll is cut into two parts which are bent in the form of a square and a circle respectively. Using Lagrange’s method of undetermined multipliers, find the least value of the sum of the areas so formed.
Answer:
Introduction
The problem is to minimize the sum of the areas of a square and a circle formed by cutting a wire of length ll into two parts. We will use Lagrange’s method of undetermined multipliers to solve this optimization problem.
Assumptions
The wire is of uniform thickness.
The wire is perfectly flexible and can be bent into the shapes of a square and a circle without any loss of material.
Definitions
Let xx be the side length of the square.
Let rr be the radius of the circle.
The perimeter of the square is 4x4x.
The circumference of the circle is 2pi r2\pi r.
Constraints
The length of the wire ll is given by:
l=4x+2pi r quad(Constraint Equation)l = 4x + 2\pi r \quad \text{(Constraint Equation)}
Objective Function
The sum of the areas of the square A_(“square”)A_{\text{square}} and the circle A_(“circle”)A_{\text{circle}} is given by:
The least value of the sum of the areas of the square and the circle formed by cutting a wire of length ll is (l^(2))/(16+4pi)\frac{l^2}{16 + 4\pi}. This is achieved when the side length of the square is (l)/(4+pi)\frac{l}{4 + \pi} and the radius of the circle is (l)/(2(4+pi))\frac{l}{2(4 + \pi)}.
Question:-02(c) यदि P,Q,R;P^(‘),Q^(‘),R^(‘)\mathrm{P}, \mathrm{Q}, \mathrm{R} ; \mathrm{P}^{\prime}, \mathrm{Q}^{\prime}, \mathrm{R}^{\prime}, एक बिन्दु से दीर्घवृत्तज (x^(2))/(a^(2))+(y^(2))/(b^(2))+(z^(2))/(c^(2))=1\frac{\mathrm{x}^2}{\mathrm{a}^2}+\frac{\mathrm{y}^2}{\mathrm{~b}^2}+\frac{\mathrm{z}^2}{\mathrm{c}^2}=1 पर छः (सिक्स) अभिलम्ब पाद हैं तथा lx+my+nz=pl \mathrm{x}+\mathrm{my}+\mathrm{nz}=\mathrm{p} से समतल PQR\mathrm{PQR} निरूपित है, दर्शाइए कि (x)/(a^(2)l)+(y)/(b^(2)(m))+(z)/(c^(2)n)+(1)/(p)=0\frac{\mathrm{x}}{\mathrm{a}^2 l}+\frac{\mathrm{y}}{\mathrm{b}^2 \mathrm{~m}}+\frac{\mathrm{z}}{\mathrm{c}^2 \mathrm{n}}+\frac{1}{\mathrm{p}}=0, समतल P^(‘)Q^(‘)R^(‘)\mathrm{P}^{\prime} \mathrm{Q}^{\prime} \mathrm{R}^{\prime} को निरूपित करता है ।
Question:-02(c) If P,Q,R;P^(‘),Q^(‘),R^(‘)\mathrm{P}, \mathrm{Q}, \mathrm{R} ; \mathrm{P}^{\prime}, \mathrm{Q}^{\prime}, \mathrm{R}^{\prime} are feet of the six normals drawn from a point to the ellipsoid (x^(2))/(a^(2))+(y^(2))/(b^(2))+(z^(2))/(c^(2))=1\frac{\mathrm{x}^2}{\mathrm{a}^2}+\frac{\mathrm{y}^2}{\mathrm{~b}^2}+\frac{\mathrm{z}^2}{\mathrm{c}^2}=1, and the plane PQR\mathrm{PQR} is represented by lx+my+nz=pl x+m y+n z=p, show that the plane P^(‘)Q^(‘)R^(‘)P^{\prime} Q^{\prime} R^{\prime} is given by (x)/(a^(2)l)+(y)/(b^(2)(m))+(z)/(c^(2)n)+(1)/(p)=0\frac{\mathrm{x}}{\mathrm{a}^2 l}+\frac{\mathrm{y}}{\mathrm{b}^2 \mathrm{~m}}+\frac{\mathrm{z}}{\mathrm{c}^2 \mathrm{n}}+\frac{1}{\mathrm{p}}=0.
Answer:
Introduction
The problem is to show that if P,Q,R;P^(‘),Q^(‘),R^(‘)P, Q, R; P’, Q’, R’ are the feet of the six normals drawn from a point to the ellipsoid (x^(2))/(a^(2))+(y^(2))/(b^(2))+(z^(2))/(c^(2))=1\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1, and the plane PQRPQR is represented by lx+my+nz=plx + my + nz = p, then the plane P^(‘)Q^(‘)R^(‘)P’Q’R’ is given by (x)/(a^(2)l)+(y)/(b^(2)m)+(z)/(c^(2)n)+(1)/(p)=0\frac{x}{a^2l} + \frac{y}{b^2m} + \frac{z}{c^2n} + \frac{1}{p} = 0.
Definitions
P,Q,RP, Q, R: Feet of the normals from a point (alpha,beta,gamma)(\alpha, \beta, \gamma) to the ellipsoid.
P^(‘),Q^(‘),R^(‘)P’, Q’, R’: Corresponding conjugate points to P,Q,RP, Q, R on the ellipsoid.
lx+my+nz=plx + my + nz = p: Equation of the plane PQRPQR.
Method/Approach
Define the equation of the plane P^(‘)Q^(‘)R^(‘)P’Q’R’ and the locus of the feet of the normals.
Use the coordinates of the feet of the normals drawn from (alpha,beta,gamma)(\alpha, \beta, \gamma) to the ellipsoid.
Compare the equations to find the relationship between the coefficients of the planes PQRPQR and P^(‘)Q^(‘)R^(‘)P’Q’R’.
Work/Calculations
Step 1: Equation of Plane P^(‘)Q^(‘)R^(‘)P’Q’R’
Let the equation of the plane P^(‘)Q^(‘)R^(‘)P’Q’R’ be
The equation of the plane P^(‘)Q^(‘)R^(‘)P’Q’R’ passing through the conjugate points corresponding to the feet of the normals from a point to the ellipsoid (x^(2))/(a^(2))+(y^(2))/(b^(2))+(z^(2))/(c^(2))=1\frac{x^2}{a^2} + \frac{y^2}{b^2} + \frac{z^2}{c^2} = 1 is (x)/(a^(2)l)+(y)/(b^(2)m)+(z)/(c^(2)n)+(1)/(p)=0\frac{x}{a^2l} + \frac{y}{b^2m} + \frac{z}{c^2n} + \frac{1}{p} = 0, when the equation of the plane PQRPQR is lx+my+nz=plx + my + nz = p. This proves the statement.
Question:-03(a) माना समुच्चय {:P={[x],[y],[z])∣[x-y-z=0″ तथा “],[2x-y+z=0]}\left.\mathrm{P}=\left\{\begin{array}{l}\mathrm{x} \\ \mathrm{y} \\ \mathrm{z}\end{array}\right) \mid \begin{array}{c}\mathrm{x}-\mathrm{y}-\mathrm{z}=0 \text { तथा } \\ 2 \mathrm{x}-\mathrm{y}+\mathrm{z}=0\end{array}\right\} सदिश समष्टि R^(3)(R)\mathbb{R}^3(\mathbb{R}) के सदिशों का एक समूह है । तब
(i) सिद्ध कीजिए कि P,R^(3)\mathrm{P}, \mathbb{R}^3 की एक उपसमष्टि है ।
(ii) P\mathrm{P} का एक आधार तथा विमा ज्ञात कीजिए ।
Question:-03(a) Let the set {:P={[x],[y],[z])∣[x-y-z=0″ and “],[2x-y+z=0]}\left.P=\left\{\begin{array}{c}x \\ y \\ z\end{array}\right) \mid \begin{array}{c}x-y-z=0 \text { and } \\ 2 x-y+z=0\end{array}\right\} be the collection of vectors of a vector space R^(3)(R)\mathbb{R}^3(\mathbb{R}). Then
(i) prove that P\mathrm{P} is a subspace of R^(3)\mathbb{R}^3.
(ii) find a basis and dimension of PP.
Answer:
Introduction
The problem asks us to consider a set PP of vectors in R^(3)\mathbb{R}^3 defined by two equations x-y-z=0x-y-z=0 and 2x-y+z=02x-y+z=0. We are tasked with:
Proving that PP is a subspace of R^(3)\mathbb{R}^3.
Finding a basis and the dimension of PP.
Definitions
A subspace WW of R^(3)\mathbb{R}^3 is a set of vectors that is closed under vector addition and scalar multiplication and contains the zero vector.
A basis of a subspace is a set of linearly independent vectors that span the subspace.
The dimension of a subspace is the number of vectors in its basis.
Method/Approach
To prove that PP is a subspace, we need to show that it is closed under vector addition and scalar multiplication and contains the zero vector.
To find a basis and dimension, we will solve the system of equations defining PP to find the general form of vectors in PP.
Work/Calculations
Part (i): Proving PP is a Subspace
Closure under Vector Addition: Let u=(x_(1),y_(1),z_(1))\mathbf{u} = (x_1, y_1, z_1) and v=(x_(2),y_(2),z_(2))\mathbf{v} = (x_2, y_2, z_2) be vectors in PP. Then u+v=(x_(1)+x_(2),y_(1)+y_(2),z_(1)+z_(2))\mathbf{u} + \mathbf{v} = (x_1 + x_2, y_1 + y_2, z_1 + z_2). Since u\mathbf{u} and v\mathbf{v} satisfy the equations x-y-z=0x-y-z=0 and 2x-y+z=02x-y+z=0, u+v\mathbf{u} + \mathbf{v} will also satisfy these equations.
Closure under Scalar Multiplication: Let u=(x,y,z)\mathbf{u} = (x, y, z) be a vector in PP and cc be a scalar. Then cu=(cx,cy,cz)c\mathbf{u} = (cx, cy, cz). Since u\mathbf{u} satisfies the equations x-y-z=0x-y-z=0 and 2x-y+z=02x-y+z=0, cuc\mathbf{u} will also satisfy these equations.
Contains Zero Vector: The zero vector (0,0,0)(0, 0, 0) satisfies the equations x-y-z=0x-y-z=0 and 2x-y+z=02x-y+z=0, so it is in PP.
Thus, PP is a subspace of R^(3)\mathbb{R}^3.
Part (ii): Finding a Basis and Dimension
To find the general form of vectors in PP, we row-reduced the augmented matrix corresponding to the system of equations:
From the row-reduced form, we can write the system of equations as:
{:[x+2z=0″,”],[y+3z=0.]:}\begin{aligned}
x + 2z &= 0, \\
y + 3z &= 0.
\end{aligned}
The general form of vectors in PP can be written as:
([x],[y],[z])=z([-2],[-3],[1])\begin{pmatrix}
x \\
y \\
z
\end{pmatrix}
= z
\begin{pmatrix}
-2 \\
-3 \\
1
\end{pmatrix}
Here, zz is a free parameter, and the vector ([-2],[-3],[1])\begin{pmatrix} -2 \\ -3 \\ 1 \end{pmatrix} spans the subspace PP.
So, the basis for PP is {([-2],[-3],[1])}\left\{ \begin{pmatrix} -2 \\ -3 \\ 1 \end{pmatrix} \right\}, and the dimension of PP is 1.
Conclusion
PP is a subspace of R^(3)\mathbb{R}^3 as it is closed under vector addition and scalar multiplication and contains the zero vector.
The basis for PP is {([-2],[-3],[1])}\left\{ \begin{pmatrix} -2 \\ -3 \\ 1 \end{pmatrix} \right\}, and the dimension of PP is 1.
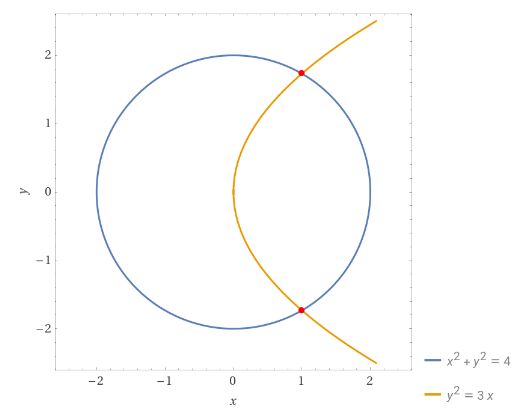
Question:-03(b) द्विशः समाकलन का उपयोग करके, वृत्त x^(2)+y^(2)=4\mathrm{x}^2+\mathrm{y}^2=4 तथा परवलय y^(2)=3x\mathrm{y}^2=3 \mathrm{x} के उभयनिष्ठ क्षेत्रफल का परिकलन कीजिए ।
Question:-03(b)Use double integration to calculate the area common to the circle x^(2)+y^(2)=4x^2+y^2=4 and the parabola y^(2)=3xy^2=3 x.
Answer:
Introduction: We will calculate the area common to the circle x^(2)+y^(2)=4x^2+y^2=4 and the parabola y^(2)=3xy^2=3 x using double integration.
Assumptions: None
Method/Approach: We will use polar coordinates to transform the given region and perform double integration to find the common area.
Work/Calculations: First, let’s find the points of intersection between the circle and the parabola: x^(2)+y^(2)=4x^2+y^2=4 and y^(2)=3xy^2=3 x
Substitute the parabola equation into the circle equation:
The area common to the circle x^(2)+y^(2)=4x^2+y^2=4 and the parabola y^(2)=3xy^2=3 x is (8)/(sqrt3)~~4.6188\frac{8}{\sqrt{3}} \approx 4.6188 square units. We used double integration to find this area.
Question:-03(c) लघुतम संभाव्य त्रिज्या के गोले का समीकरण ज्ञात कीजिए जो सरल रेखाओं : (x-3)/(3)=(y-8)/(-1)=(z-3)/(1)\frac{\mathrm{x}-3}{3}=\frac{\mathrm{y}-8}{-1}=\frac{\mathrm{z}-3}{1} तथा (x+3)/(-3)=(y+7)/(2)=(z-6)/(4)\frac{\mathrm{x}+3}{-3}=\frac{\mathrm{y}+7}{2}=\frac{\mathrm{z}-6}{4} को स्पर्श करता है ।
Question:-03(c)Find the equation of the sphere of smallest possible radius which touches the straight lines : (x-3)/(3)=(y-8)/(-1)=(z-3)/(1)\frac{x-3}{3}=\frac{y-8}{-1}=\frac{z-3}{1} and (x+3)/(-3)=(y+7)/(2)=(z-6)/(4)\frac{x+3}{-3}=\frac{y+7}{2}=\frac{z-6}{4}
Answer:
Introduction
The problem asks us to find the equation of the sphere with the smallest possible radius that touches two given straight lines:
The lines and sphere are in a 3D Cartesian coordinate system.
The sphere is defined by the equation (x-a)^(2)+(y-b)^(2)+(z-c)^(2)=r^(2)(x-a)^2 + (y-b)^2 + (z-c)^2 = r^2, where (a,b,c)(a, b, c) is the center and rr is the radius.
Definitions
A sphere is a set of points in space that are equidistant from a given point called the center.
A line in 3D space can be represented parametrically as x=x_(0)+atx = x_0 + at, y=y_(0)+bty = y_0 + bt, z=z_(0)+ctz = z_0 + ct, where (x_(0),y_(0),z_(0))(x_0, y_0, z_0) is a point on the line and a,b,ca, b, c are the direction ratios.
Method/Approach
Write the parametric equations for the two lines.
Use the formula for the distance between two skew lines to find the distance between the lines.
The radius of the smallest sphere that touches both lines will be half of this distance.
Find the coordinates of the center of the sphere by taking the midpoint of the shortest segment connecting the two lines.
Work/Calculations
Step 1: Parametric Equations for the Lines
The parametric equations for Line 1 and Line 2 can be written as:
Line 1: x=3+3tx = 3 + 3t, y=8-ty = 8 – t, z=3+tz = 3 + t
Here, vec(a)\vec{a} and vec(b)\vec{b} are the direction vectors of the lines, and vec(r_(1))\vec{r_1} and vec(r_(2))\vec{r_2} are position vectors of points on the lines.
For Line 1, vec(a)=(:3,-1,1:)\vec{a} = \langle 3, -1, 1 \rangle and vec(r_(1))=(:3,8,3:)\vec{r_1} = \langle 3, 8, 3 \rangle.
For Line 2, vec(b)=(:-3,2,4:)\vec{b} = \langle -3, 2, 4 \rangle and vec(r_(2))=(:-3,-7,6:)\vec{r_2} = \langle -3, -7, 6 \rangle.
After calculating, the distance dd between the two skew lines is 3sqrt303 \sqrt{30}.
Step 3: Radius of the Smallest Sphere
The radius rr of the smallest sphere that can touch both lines is half of this distance:
r=(3sqrt30)/(2)r = \frac{3 \sqrt{30}}{2}
Step 4: Coordinates of the Center
The coordinates of the center of the sphere can be found by taking the midpoint of the shortest segment connecting the two lines. The midpoint MM is given by:
This sphere has a radius of (3sqrt30)/(2)\frac{3 \sqrt{30}}{2} and its center is located at (0,(1)/(2),(9)/(2))(0, \frac{1}{2}, \frac{9}{2}).
Question:-04(a) एक रैखिक प्रतिचित्र T:R^(2)rarrR^(2)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^2 ज्ञात कीजिए जो कि R^(2)\mathbb{R}^2 के प्रत्येक सदिश को theta\theta कोण से घुमा देता है । यह भी सिद्ध कीजिए कि theta=(pi)/(2)\theta=\frac{\pi}{2} के लिए, T\mathrm{T} का कोई भी अभिलक्षणिक मान (आइगेनमान) R\mathbb{R} में नहीं है ।
Question:-04(a) Find a linear map T:R^(2)rarrR^(2)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^2 which rotates each vector of R^(2)\mathbb{R}^2 by an angle theta\theta. Also, prove that for theta=(pi)/(2),T\theta=\frac{\pi}{2}, \mathrm{~T} has no eigenvalue in R\mathbb{R}.
Answer:
Introduction
The problem asks us to find a linear map T:R^(2)rarrR^(2)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^2 that rotates each vector in R^(2)\mathbb{R}^2 by an angle theta\theta. Additionally, we are to prove that when theta=(pi)/(2)\theta = \frac{\pi}{2}, the linear map T\mathrm{T} has no real eigenvalues.
Assumptions
The linear map T\mathrm{T} is a rotation in R^(2)\mathbb{R}^2.
theta\theta is the angle of rotation.
Definition
A linear map T\mathrm{T} is represented by a matrix AA such that T(x)=Ax\mathrm{T}(\mathbf{x}) = A\mathbf{x}.
Method/Approach
To find the linear map T\mathrm{T}, we will first find the matrix representation of the rotation. Then, we will use the characteristic equation to prove that for theta=(pi)/(2)\theta = \frac{\pi}{2}, T\mathrm{T} has no real eigenvalues.
Finding the Linear Map T\mathrm{T}
The matrix representation AA of a rotation by theta\theta in R^(2)\mathbb{R}^2 is given by:
The linear map T:R^(2)rarrR^(2)\mathrm{T}: \mathbb{R}^2 \rightarrow \mathbb{R}^2 that rotates each vector in R^(2)\mathbb{R}^2 by an angle theta\theta is represented by the matrix AA as shown above. When theta=(pi)/(2)\theta = \frac{\pi}{2}, the characteristic equation yields eigenvalues lambda=+-i\lambda = \pm i, which are not real numbers. Therefore, for theta=(pi)/(2)\theta = \frac{\pi}{2}, T\mathrm{T} has no real eigenvalues.
Question:-04(b) वक्र y^(2)x^(2)=x^(2)-a^(2)\mathrm{y}^2 \mathrm{x}^2=\mathrm{x}^2-\mathrm{a}^2 का अनुरेख (ट्रेस) कीजिए, जहाँ a\mathrm{a} एक वास्तविक अचर है ।
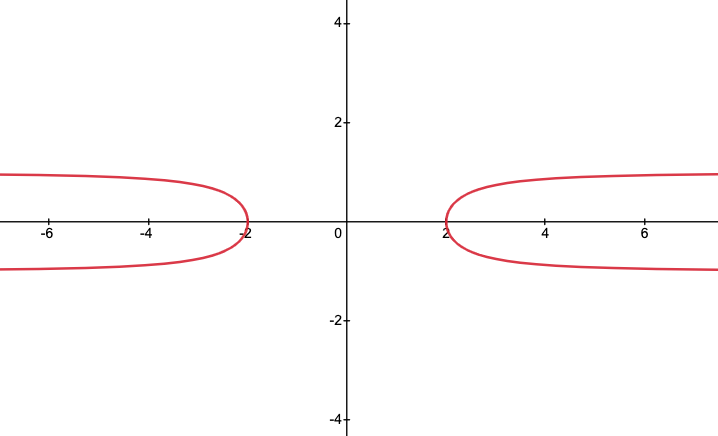
Question:-04(b) Trace the curve y^(2)x^(2)=x^(2)-a^(2)y^2 x^2=x^2-a^2, where aa is a real constant.
Answer:
Introduction
We are tasked with tracing the curve y^(2)x^(2)=x^(2)-a^(2)y^2 x^2 = x^2 – a^2, where aa is a real constant. We’ll explore various properties of the curve, such as its symmetry, whether it passes through the origin, its intercepts with the coordinate axes, its asymptotes, and the regions it occupies.
Assumptions
aa is a real constant.
xx and yy are real numbers.
Method/Approach
To trace the curve, we’ll follow these steps:
Determine the symmetry of the curve.
Check if the curve passes through the origin.
Find the intercepts with the coordinate axes.
Identify any asymptotes.
Describe the regions the curve occupies.
Let’s proceed with each step.
1. Symmetry
To check for symmetry, we’ll substitute xx with -x-x and yy with -y-y in the equation and see if it remains unchanged.
The original equation is y^(2)x^(2)=x^(2)-a^(2)y^2 x^2 = x^2 – a^2.
After calculating, we find that the equation becomes 0=-a^(2)0 = -a^2, which is not true for a!=0a \neq 0. Therefore, the curve does not pass through the origin.
3. Intercepts with Coordinate Axes
To find the x-intercept, we set y=0y = 0 and solve for xx.
To find the y-intercept, we set x=0x = 0 and solve for yy.
After calculating, we find that the x-intercepts are at x=+-ax = \pm a and there is no y-intercept.
4. Asymptotes
The equation y^(2)x^(2)=x^(2)-a^(2)y^2 x^2 = x^2 – a^2 can be rearranged as y^(2)=1-(a^(2))/(x^(2))y^2 = 1 – \frac{a^2}{x^2}.
As x rarr oox \rightarrow \infty, y^(2)rarr1y^2 \rightarrow 1, so y rarr+-1y \rightarrow \pm 1.
Thus, the curve has horizontal asymptotes at y=+-1y = \pm 1.
5. Region
The curve is defined for x!=0x \neq 0 and y^(2) >= 0y^2 \geq 0.
Therefore, the curve exists in all quadrants except along the y-axis.
Conclusion
The curve y^(2)x^(2)=x^(2)-a^(2)y^2 x^2 = x^2 – a^2 has the following properties:
It is symmetric about the x-axis, y-axis, and the origin.
It does not pass through the origin.
The x-intercepts are at x=+-ax = \pm a, and there is no y-intercept.
It has horizontal asymptotes at y=+-1y = \pm 1.
It exists in all quadrants except along the y-axis.
Question:-04(c) यदि समतल ux+vy+wz=0u x+v y+w z=0, शंकु ax^(2)+by^(2)+cz^(2)=0a x^2+b y^2+\mathrm{cz}^2=0 को लंब जनकों में काटता है, तो सिद्ध कीजिए कि (b+c)u^(2)+(c+a)v^(2)+(a+b)w^(2)=0(b+c) u^2+(c+a) v^2+(a+b) w^2=0.
Question:-04(c) If the plane ux+vy+wz=0u x+v y+w z=0 cuts the cone ax^(2)+by^(2)+cz^(2)=0a x^2+b y^2+c z^2=0 in perpendicular generators, then prove that (b+c)u^(2)+(c+a)v^(2)+(a+b)w^(2)=0(b+c) u^2+(c+a) v^2+(a+b) w^2=0.
Answer:
Introduction
We are given a plane ux+vy+wz=0ux + vy + wz = 0 and a cone ax^(2)+by^(2)+cz^(2)=0ax^2 + by^2 + cz^2 = 0. The goal is to prove that if the plane cuts the cone in perpendicular generators, then (b+c)u^(2)+(c+a)v^(2)+(a+b)w^(2)=0(b+c)u^2 + (c+a)v^2 + (a+b)w^2 = 0.
Assumptions
aa, bb, and cc are constants for the cone.
uu, vv, and ww are constants for the plane.
xx, yy, and zz are variables representing points in 3D space.
Method/Approach
Equation of One Line of Intersection: Assume that one of the lines of intersection between the plane and the cone can be represented as (x)/(l)=(y)/(m)=(z)/(n)\frac{x}{l} = \frac{y}{m} = \frac{z}{n}.
Equations from the Plane and Cone: Substitute these into the equations of the plane and the cone, which gives:
Eliminating One Variable: Eliminate nn between these two equations to form a quadratic equation. This is done by solving Equation i for nn in terms of ll and mm, and then substituting into Equation ii.
Condition for Perpendicular Generators: Use the properties of the roots of the quadratic equation to establish the condition for perpendicularity.
The roots of the quadratic equation can be represented as (l_(1))/(m_(1))\frac{l_1}{m_1} and (l_(2))/(m_(2))\frac{l_2}{m_2}. Using Vieta’s formulas, the product of the roots is given by:
And with that, we can confidently say that the statement is proved.
Conclusion
We have successfully proved that if the plane ux+vy+wz=0ux + vy + wz = 0 intersects the cone ax^(2)+by^(2)+cz^(2)=0ax^2 + by^2 + cz^2 = 0 in perpendicular generators, then (b+c)u^(2)+(c+a)v^(2)+(a+b)w^(2)=0(b+c)u^2 + (c+a)v^2 + (a+b)w^2 = 0.
खण्ड B
SECTION B
Question:-05(a) दर्शाइए कि अवकल समीकरण (dy)/(dx)+Py=Q\frac{\mathrm{dy}}{\mathrm{dx}}+\mathrm{Py}=\mathrm{Q} का व्यापक हल
y=(Q)/(P)-e^(-intPdx){C+inte^(intPdx)(d)((Q)/(P))}\mathrm{y}=\frac{\mathrm{Q}}{\mathrm{P}}-\mathrm{e}^{-\int \mathrm{P} d x}\left\{\mathrm{C}+\int \mathrm{e}^{\int \mathrm{P} d x} \mathrm{~d}\left(\frac{\mathrm{Q}}{\mathrm{P}}\right)\right\}
के रूप में लिखा जा सकता है, जहाँ P,Q,x\mathrm{P}, \mathrm{Q}, \mathrm{x} के शून्येतर फलन हैं तथा C\mathrm{C} एक स्वेच्छ अचर है ।
Question:-05(a)Show that the general solution of the differential equation (dy)/(dx)+Py=Q\frac{\mathrm{dy}}{\mathrm{dx}}+\mathrm{Py}=\mathrm{Q} can be written in the form y=(Q)/(P)-e^(-int Pdx){C+inte^(int Pdx)d((Q)/(P))}y=\frac{Q}{P}-e^{-\int P d x}\left\{C+\int e^{\int P d x} d\left(\frac{Q}{P}\right)\right\}, where P,Q\mathrm{P}, \mathrm{Q} are non-zero functions of x\mathrm{x} and C\mathrm{C}, an arbitrary constant.
Answer:
Introduction
We are given a first-order linear differential equation (dy)/(dx)+Py=Q\frac{dy}{dx} + Py = Q, where PP and QQ are non-zero functions of xx. The goal is to find the general solution of this equation in the given form:
y=(Q)/(P)-e^(-int Pdx){C+inte^(int Pdx)d((Q)/(P))}y = \frac{Q}{P} – e^{-\int P dx} \left\{ C + \int e^{\int P dx} d\left( \frac{Q}{P} \right) \right\}
where CC is an arbitrary constant.
Method/Approach
To solve this problem, we’ll use the following steps:
Rewrite the given differential equation in a specific form.
Check if the equation is exact and find the integrating factor (IF) if it’s not.
Use the integrating factor to make the equation exact.
Integrate to find the general solution.
Step 1: Rewrite the Differential Equation
First, let’s rewrite the given differential equation (dy)/(dx)+Py=Q\frac{dy}{dx} + Py = Q as:
(Py-Q)dx+dy=0quad(Equation 1)(P y – Q) dx + dy = 0 \quad \text{(Equation 1)}
This is in the form Mdx+Ndy=0M dx + N dy = 0, where M=Py-QM = Py – Q and N=1N = 1.
Step 2: Check for Exactness and Find IF
We need to check if Equation 1 is exact. For that, we calculate (del M)/(del y)\frac{\partial M}{\partial y} and (del N)/(del x)\frac{\partial N}{\partial x}:
Since (del M)/(del y)!=(del N)/(del x)\frac{\partial M}{\partial y} \neq \frac{\partial N}{\partial x}, Equation 1 is not exact.
The integrating factor (IF) is given by e^(int Pdx)e^{\int P dx}.
Step 3: Make the Equation Exact Using IF
We multiply Equation 1 by the integrating factor e^(int Pdx)e^{\int P dx}:
e^(int Pdx)(Py-Q)dx+e^(int Pdx)dy=0quad(Equation 2)e^{\int P dx} (P y – Q) dx + e^{\int P dx} dy = 0 \quad \text{(Equation 2)}
Now, Equation 2 is exact.
Step 4: Integrate to Find the General Solution
Integrating both sides of Equation 2, we get:
int d(ye^(int Pdx))=int Qe^(int Pdx)dx\int d(y e^{\int P dx}) = \int Q e^{\int P dx} dx
Simplifying, we find:
ye^(int Pdx)=int Qe^(int Pdx)dx+Cy e^{\int P dx} = \int Q e^{\int P dx} dx + C
{:[=>ye^(int Pdx)=Q inte^(int Pdx)dx-int[(d)/(dx)Q inte^(int Pdx)dx]dx+C” (by integrating by parts) “],[=>ye^(int Pdx)=(Qe^(int Pdx))/(P)-int[(dQ)/(dx)(e^(int Pdx))/(P)]dx+C],[=>ye^(int Pdx)=(Q)/(P)e^(int Pdx)-int[e^(int Pdx)d((Q)/(P))]+C],[=>y=(Q)/(P)-e^(-int Pdx)[C+inte^(int Pdx)d((Q)/(P))]],[]:}\begin{aligned}
& \Rightarrow y e^{\int P \mathbf{d} x}=Q \int e^{\int P \mathbf{d} x} \mathbf{d} x-\int\left[\frac{\mathbf{d}}{\mathbf{d} x} Q \int e^{\int P \mathbf{d} x} \mathbf{d} x\right] \mathbf{d} x+C \text { (by integrating by parts) } \\
& \Rightarrow y e^{\int P \mathrm{~d} x}=\frac{Q e^{\int P \mathrm{~d} x}}{P}-\int\left[\frac{\mathbf{d} Q}{\mathbf{d} x} \frac{e^{\int P \mathrm{~d} x}}{P}\right]dx+C \\
& \Rightarrow y e^{\int P \mathrm{~d} x}=\frac{Q}{P} e^{\int P \mathrm{~d} x}-\int\left[e^{\int P \mathrm{~d} x} \mathbf{d}\left(\frac{Q}{P}\right)\right]+C \\
& \Rightarrow y=\frac{Q}{P}-e^{-\int P \mathrm{~d} x}\left[C+\int e^{\int P \mathrm{~d} x} \mathbf{d}\left(\frac{Q}{P}\right)\right] \\
&
\end{aligned}
Finally, rewriting this in the desired form, we get:
y=(Q)/(P)-e^(-int Pdx){C+inte^(int Pdx)d((Q)/(P))}y = \frac{Q}{P} – e^{-\int P dx} \left\{ C + \int e^{\int P dx} d\left( \frac{Q}{P} \right) \right\}
Conclusion
We have successfully found the general solution of the given differential equation (dy)/(dx)+Py=Q\frac{dy}{dx} + Py = Q in the form specified. The key steps involved rewriting the equation, finding the integrating factor, making the equation exact, and then integrating to find yy.
Question:-05(b) दर्शाइए कि परवलयों के निकाय : x^(2)=4a(y+a)\mathrm{x}^2=4 \mathrm{a}(\mathrm{y}+\mathrm{a}) के लंबकोणीय संछेदी, उसी निकाय में स्थित होते हैं ।
Question:-05(b) Show that the orthogonal trajectories of the system of parabolas : x^(2)=4a(y+a)\mathrm{x}^2=4 \mathrm{a}(\mathrm{y}+\mathrm{a}) belong to the same system.
Answer:
Introduction
The problem asks us to show that the orthogonal trajectories of the given system of parabolas x^(2)=4a(y+a)x^2 = 4a(y + a) belong to the same system of parabolas. In simpler terms, we want to prove that the curves that intersect the given parabolas at right angles are also part of the same family of parabolas.
Assumptions
The equation x^(2)=4a(y+a)x^2 = 4a(y + a) represents a family of parabolas, parameterized by aa.
Orthogonal trajectories are curves that intersect the original family of curves at right angles.
Method/Approach
To find the orthogonal trajectories, we’ll take the following steps:
Differentiate the given equation with respect to yy to find the slope of the tangent to the curve.
Replace the slope with its negative reciprocal to get the slope of the orthogonal trajectory.
Simplify the equation to show that it belongs to the same system of parabolas.
Work/Calculations
Step 1: Differentiate the Given Equation
The given equation is x^(2)=4a(y+a)x^2 = 4a(y + a)—-(1).
Differentiating both sides with respect to yy, we get:
2x(dx)/(dy)=4a2x \frac{dx}{dy} = 4a
=>(x)/(2)(dx)/(dy)=a\Rightarrow \frac{x}{2} \frac{dx}{dy} = a
Step 2: Replace the Slope with its Negative Reciprocal
The slope of the orthogonal trajectory is the negative reciprocal of the slope of the curve. Therefore, the slope of the orthogonal trajectory is -(1)/((dx)/(dy))-\frac{1}{\frac{dx}{dy}}.
=>x(dx)/(dy)=-2[(y(dx)/(dy)-(x)/(2))/((dx)/(dy))]\Rightarrow x \frac{dx}{dy} = -2 \left[\frac{y \frac{dx}{dy} – \frac{x}{2}}{\frac{dx}{dy}}\right]
=>x((dx)/(dy))^(2)=-2y(dx)/(dy)+x quad(Equation 3)\Rightarrow x \left(\frac{dx}{dy}\right)^2 = -2y \frac{dx}{dy} + x \quad \text{(Equation 3)}
Step 3: Simplify the Equation
We can rewrite equation (2) as:
x=2y(dx)/(dy)+x((dx)/(dy))^(2)x = 2y \frac{dx}{dy} + x \left(\frac{dx}{dy}\right)^2
=>x((dx)/(dy))^(2)=x-2y(dx)/(dy)quad(Equation 4)\Rightarrow x \left(\frac{dx}{dy}\right)^2 = x – 2y \frac{dx}{dy} \quad \text{(Equation 4)}
Upon comparing Equation 3 and Equation 4, we find that they are the same, which means the curve is self-orthogonal.
Conclusion
We have shown that the orthogonal trajectories of the system of parabolas x^(2)=4a(y+a)x^2 = 4a(y + a) also belong to the same system of parabolas. Therefore, the orthogonal trajectories are part of the original family of curves, making the system self-orthogonal.
Question:-05(c) w\mathrm{w} भार का एक पिंड, theta\theta कोण से झुके हुए एक रूक्ष समतल पर स्थित है, घर्षण गुणांक mu\mu, tan theta\tan \theta से अधिक है । पिंड को समतल पर ऊपर की तरफ ‘ bb ‘ दूरी तक धीरे-धीरे खींचने तथा वापस आरम्भिक बिन्दु तक खींचने में किए गए कार्य को ज्ञात कीजिए, जहाँ लगाया गया बल प्रत्येक दशा में समतल के समान्तर है ।
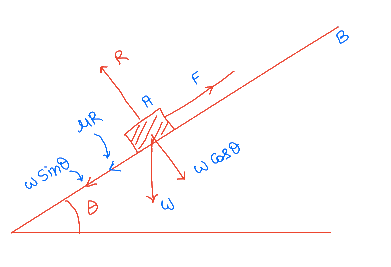
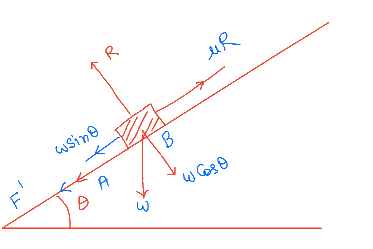
Question:-05(c)A body of weight ww rests on a rough inclined plane of inclination theta\theta, the coefficient of friction, mu\mu, being greater than tan theta\tan \theta. Find the work done in slowly dragging the body a distance ‘b’ up the plane and then dragging it back to the starting point, the applied force being in each case parallel to the plane.
Answer:
Introduction
We are given a problem involving a body of weight ww that rests on an inclined plane with an inclination angle theta\theta. The coefficient of friction mu\mu is greater than tan theta\tan \theta. We are asked to find the work done in dragging the body a distance bb up the plane and then back down to the starting point. The applied force in both cases is parallel to the plane.
Assumptions
The coefficient of friction mu\mu is greater than tan theta\tan \theta.
The applied force is parallel to the inclined plane.
The body moves slowly, implying that we can neglect any effects due to acceleration or deceleration.
Definitions
ww: Weight of the body
theta\theta: Inclination angle of the plane
mu\mu: Coefficient of friction
bb: Distance the body is dragged up and then down the plane
FF: Applied force to drag the body up the plane
F^(‘)F’: Applied force to drag the body down the plane
RR: Normal reaction force between the body and the plane
Method/Approach
We will resolve the forces acting on the body into components parallel and perpendicular to the inclined plane. Then we will use these components to find the applied forces FF and F^(‘)F’ for dragging the body up and down the plane, respectively. Finally, we will calculate the total work done in both cases.
Work/Calculations
Case I: Up the Plane
Resolving forces along and perpendicular to the plane, we have:
w sin theta+mu R=F quad(Equation 1)w \sin \theta + \mu R = F \quad \text{(Equation 1)}
R=w cos thetaquad(Equation 2)R = w \cos \theta \quad \text{(Equation 2)}
Substituting Equation 2 into Equation 1, we get:
F=w sin theta+mu w cos thetaF = w \sin \theta + \mu w \cos \theta
F=w cos theta(mu+tan theta)quad(Equation 3)F = w \cos \theta (\mu + \tan \theta) \quad \text{(Equation 3)}
The work done WW in dragging the body a distance bb up the plane is:
W=bFW = b F
Let’s substitute the values into the formula:
W=bw cos theta(mu+tan theta)W = b w \cos \theta (\mu + \tan \theta)
After calculating, we get:
W=bw cos theta(mu+tan theta)quad(Equation A)W = b w \cos \theta (\mu + \tan \theta) \quad \text{(Equation A)}
Case II: Down the Plane
Resolving forces along and perpendicular to the plane, we have:
w sin theta+F^(‘)=mu R quad(Equation 4)w \sin \theta + F’ = \mu R \quad \text{(Equation 4)}
R=w cos thetaquad(Equation 5)R = w \cos \theta \quad \text{(Equation 5)}
Substituting Equation 5 into Equation 4, we get:
F^(‘)=mu w cos theta-w sin thetaF’ = \mu w \cos \theta – w \sin \theta
F^(‘)=w cos theta(mu-tan theta)quad(Equation 6):’mu > tan thetaF’ = w \cos \theta (\mu – \tan \theta) \quad \text{(Equation 6)} \because \mu > tan\theta
The work done W^(‘)W’ in dragging the body a distance bb down the plane is:
W^(‘)=bF^(‘)W’ = b F’
Let’s substitute the values into the formula:
W^(‘)=bw cos theta(mu-tan theta)W’ = b w \cos \theta (\mu – \tan \theta)
After calculating, we get:
W^(‘)=bw cos theta(mu-tan theta)quad(Equation B)W’ = b w \cos \theta (\mu – \tan \theta) \quad \text{(Equation B)}
Total Work Done
The total work done is W+W^(‘)W + W’:
W+W^(‘)=bw cos theta(mu+tan theta)+bw cos theta(mu-tan theta)W + W’ = b w \cos \theta (\mu + \tan \theta) + b w \cos \theta (\mu – \tan \theta)
After calculating, we get:
W+W^(‘)=2bw mu cos thetaW + W’ = 2 b w \mu \cos \theta
Conclusion
The total work done in dragging the body a distance bb up the inclined plane and then back down to the starting point is 2bw mu cos theta2 b w \mu \cos \theta. This is achieved by resolving the forces acting on the body into components parallel and perpendicular to the inclined plane and then calculating the work done in each case.
Question:-05(d) एक प्रक्षेप्य sqrt(2gh)\sqrt{2 \mathrm{gh}} वेग के साथ बिन्दु O\mathrm{O} से प्रक्षेपित किया गया तथा समतल के बिन्दु P(x,y)\mathrm{P}(\mathrm{x}, \mathrm{y}) पर स्पर्श-रेखा से टकराता है जहाँ अक्ष OX\mathrm{OX} तथा OY\mathrm{OY} क्रमशः बिन्दु O\mathrm{O} से क्षैतिज तथा अधोमुखी ऊर्ध्वाधर रेखाएँ हैं । यदि प्रक्षेपण की दो संभव दिशाएँ समकोण पर हों, तो दर्शाइए कि x^(2)=2hy\mathrm{x}^2=2 \mathrm{hy} तथा प्रक्षेपण की संभव दिशाओं में से एक, कोण POX को द्विभाजित करती है ।
Question:-05(d) A projectile is fired from a point O\mathrm{O} with velocity sqrt(2gh)\sqrt{2 \mathrm{gh}} and hits a tangent at the point P(x,y)\mathrm{P}(\mathrm{x}, \mathrm{y}) in the plane, the axes OX\mathrm{OX} and OY\mathrm{OY} being horizontal and vertically downward lines through the point O\mathrm{O}, respectively. Show that if the two possible directions of projection be at right angles, then x^(2)=2hy\mathrm{x}^2=2 \mathrm{hy} and then one of the possible directions of projection bisects the angle POX.
Answer:
Introduction
The problem involves a projectile fired from a point OO with an initial velocity sqrt(2gh)\sqrt{2gh}. The projectile hits a tangent at point P(x,y)P(x, y) in the plane. The axes OXOX and OYOY are horizontal and vertically downward lines through point OO, respectively. We are asked to show that if the two possible directions of projection are at right angles, then x^(2)=2hyx^2 = 2hy and that one of the possible directions of projection bisects the angle “POX”\text{POX}.
Assumptions
The projectile is fired from the origin OO.
The initial velocity of the projectile is sqrt(2gh)\sqrt{2gh}.
The axes OXOX and OYOY are horizontal and vertically downward, respectively.
Air resistance is negligible.
The acceleration due to gravity is gg.
Definitions
xx and yy: Coordinates of point PP where the projectile hits.
theta\theta: Angle of projection.
gg: Acceleration due to gravity.
hh: Height from which the projectile is fired.
Method/Approach
We will use the equations of motion for a projectile to find the relationship between xx and yy under the given conditions. The equations of motion for a projectile launched at an angle theta\theta with initial velocity uu are:
x=u cos(theta)tx = u \cos(\theta) t
y=u sin(theta)t-(1)/(2)gt^(2)y = u \sin(\theta) t – \frac{1}{2} g t^2
Let’s substitute the values into these equations.
Work/Calculations
Substitute Initial Velocity:
The initial velocity u=sqrt(2gh)u = \sqrt{2gh}.
Equations of Motion:
x=sqrt(2gh)cos(theta)tx = \sqrt{2gh} \cos(\theta) t
y=sqrt(2gh)sin(theta)t+(1)/(2)gt^(2)y = \sqrt{2gh} \sin(\theta) t + \frac{1}{2} g t^2
Eliminate tt to get yy in terms of xx:
Solve t=(x)/(sqrt(2gh)cos(theta))t = \frac{x}{\sqrt{2gh} \cos(\theta)} from the first equation and substitute into the second equation.
Condition for Right Angles:
For the two possible directions of projection to be at right angles, tan(theta_(1))tan(theta_(2))=-1\tan(\theta_1) \tan(\theta_2) = -1.
Therefore, 1-(4hy)/(x^(2))=-11-\frac{4 h y}{x^2}=-1
i.e., tan 2theta=(y)/(x)=tan phi\tan 2 \theta=\frac{y}{x}=\tan \phi where angle of POX=phiP O X=\phi
Therefore theta=(phi)/(2)\theta=\frac{\phi}{2}
Conclusion
We have shown that if the two possible directions of projection are at right angles, then x^(2)=2hyx^2 = 2hy. Additionally, one of the possible directions of projection bisects the angle “POX”\text{POX}.
Question:-05(e) दर्शाइए कि vec(A)=(6xy+z^(3)) hat(i)+(3x^(2)-z) hat(j)+(3xz^(2)-y) hat(k)\overrightarrow{\mathrm{A}}=\left(6 \mathrm{xy}+\mathrm{z}^3\right) \hat{\mathrm{i}}+\left(3 \mathrm{x}^2-\mathrm{z}\right) \hat{\mathrm{j}}+\left(3 x \mathrm{z}^2-\mathrm{y}\right) \hat{\mathrm{k}} अघूर्णी है । phi\phi को भी ज्ञात कीजिए जबकि vec(A)=grad phi\overrightarrow{\mathrm{A}}=\nabla \phi.
Question:-05(e)Show that vec(A)=(6xy+z^(3)) hat(i)+(3x^(2)-z) hat(j)+(3xz^(2)-y) hat(k)\overrightarrow{\mathrm{A}}=\left(6 x y+z^3\right) \hat{i}+\left(3 x^2-z\right) \hat{j}+\left(3 x z^2-y\right) \hat{k} is irrotational. Also find phi\phi such that vec(A)=grad phi\overrightarrow{\mathrm{A}}=\nabla \phi.
Answer:
Introduction: In this problem, we are given a vector field vec(A)\vec{A} and we need to show that it is irrotational. We also need to find a scalar field phi\phi such that vec(A)=grad phi\vec{A}=\nabla \phi
Assumptions: We assume that all the functions are sufficiently differentiable.
Method/Approach: We will use the concept of the curl of a vector field to show that the vector field is irrotational. Then, we will find the scalar field phi\phi by integrating the components of vec(A)\vec{A} with respect to their respective variables.
Work/Calculations:
To show that vec(A)\vec{A} is irrotational, we need to show that its curl is equal to the zero vector:
grad xx vec(A)= vec(0)\nabla \times \vec{A}=\overrightarrow{0}
The curl of vec(A)\vec{A} is given by:
grad xx vec(A)=|[ hat(i), hat(j), hat(k)],[(del)/(del x),(del)/(del y),(del)/(del z)],[6xy+z^(3),3x^(2)-z,3xz^(2)-y]|\nabla \times \vec{A}=\left|\begin{array}{ccc}
\hat{i} & \hat{j} & \hat{k} \\
\frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\
6 x y+z^3 & 3 x^2-z & 3 x z^2-y
\end{array}\right|
Calculating the determinant, we get:
{:[grad xx vec(A)=((del(3xz^(2)-y))/(del y)-(del(3x^(2)-z))/(del z)) hat(i)-((del(3xz^(2)-y))/(del x)-(del(6xy+z^(3)))/(del z)) hat(j)+],[((del(3x^(2)-z))/(del x)-(del(6xy+z^(3)))/(del y)) hat(k)]:}\begin{aligned}
& \nabla \times \vec{A}=\left(\frac{\partial\left(3 x z^2-y\right)}{\partial y}-\frac{\partial\left(3 x^2-z\right)}{\partial z}\right) \hat{i}-\left(\frac{\partial\left(3 x z^2-y\right)}{\partial x}-\frac{\partial\left(6 x y+z^3\right)}{\partial z}\right) \hat{j}+ \\
& \left(\frac{\partial\left(3 x^2-z\right)}{\partial x}-\frac{\partial\left(6 x y+z^3\right)}{\partial y}\right) \hat{k}
\end{aligned}
Now, we find the partial derivatives:
{:[(del(3xz^(2)-y))/(del y)=-1],[(del(3x^(2)-z))/(del z)=-1],[(del(3xz^(2)-y))/(del x)=3z^(2)],[(del(6xy+z^(3)))/(del z)=3z^(2)],[(del(3x^(2)-z))/(del x)=6x],[(del(6xy+z^(3)))/(del y)=6x]:}\begin{aligned}
& \frac{\partial\left(3 x z^2-y\right)}{\partial y}=-1 \\
& \frac{\partial\left(3 x^2-z\right)}{\partial z}=-1 \\
& \frac{\partial\left(3 x z^2-y\right)}{\partial x}=3 z^2 \\
& \frac{\partial\left(6 x y+z^3\right)}{\partial z}=3 z^2 \\
& \frac{\partial\left(3 x^2-z\right)}{\partial x}=6 x \\
& \frac{\partial\left(6 x y+z^3\right)}{\partial y}=6 x
\end{aligned}
Substituting the partial derivatives into the expression for the curl, we get:
grad xx vec(A)=(0) hat(i)-(0) hat(j)+(0) hat(k)= vec(0)\nabla \times \vec{A}=(0) \hat{i}-(0) \hat{j}+(0) \hat{k}=\overrightarrow{0}
Since the curl of vec(A)\vec{A} is equal to the zero vector, vec(A)\vec{A} is irrotational.
To find phi\phi such that vec(A)=grad phi\vec{A}=\nabla \phi, we need to solve the following equations:
(del phi)/(del x)=6xy+z^(3)\frac{\partial \phi}{\partial x}=6 x y+z^3
Now, we will integrate each of these partial derivatives with respect to their respective variables:
{:[phi(x”,”y”,”z)=int(6xy+z^(3))dx=3x^(2)y+xz^(3)+f_(1)(y”,”z)],[phi(x”,”y”,”z)=int(3x^(2)-z)dy=3x^(2)y-yz+f_(2)(x”,”z)],[phi(x”,”y”,”z)=int(3xz^(2)-y)dz=3x(z^(3))/(3)-yz+f_(3)(x”,”y)]:}\begin{aligned}
& \phi(x, y, z)=\int\left(6 x y+z^3\right) d x=3 x^2 y+x z^3+f_1(y, z) \\
& \phi(x, y, z)=\int\left(3 x^2-z\right) d y=3 x^2 y-y z+f_2(x, z) \\
& \phi(x, y, z)=\int\left(3 x z^2-y\right) d z=3 x \frac{z^3}{3}-y z+f_3(x, y)
\end{aligned}
Comparing these expressions for phi(x,y,z)\phi(x, y, z), we can find a scalar field that satisfies all three partial derivatives:
phi(x,y,z)=3x^(2)y+xz^(3)-yz+f(x,y,z)\phi(x, y, z)=3 x^2 y+x z^3-y z+f(x, y, z)
where f(x,y,z)f(x, y, z) is an arbitrary scalar function. In our case, we can choose f(x,y,z)=0f(x, y, z)=0 without loss of generality.
Thus, the scalar field phi\phi such that vec(A)=grad phi\vec{A}=\nabla \phi is:
phi(x,y,z)=3x^(2)y+xz^(3)-yz\phi(x, y, z)=3 x^2 y+x z^3-y z
Conclusion: We have shown that the given vector field vec(A)\vec{A} is irrotational. We also found the scalar field phi(x,y,z)=3x^(2)y+xz^(3)-yz\phi(x, y, z)=3 x^2 y+x z^3-y z such that vec(A)=grad phi\vec{A}=\nabla \phi
Question:-06(a) 2l2 l लम्बाई का एक तार (केबिल) जिसका भार w\mathrm{w} प्रति इकाई (यूनिट) लम्बाई है, एक क्षैतिज रेखा के दो बिन्दुओं P\mathrm{P} तथा Q\mathrm{Q} से लटकी हुई है । दर्शाइए कि तार की विस्तृति (स्पैन) 2l(1-(2h^(2))/(3l^(2)))2 l\left(1-\frac{2 \mathrm{~h}^2}{3 l^2}\right) है, जहाँ h\mathrm{h} तार के कसकर खींची हुई स्थिति में मध्य का झोल है ।
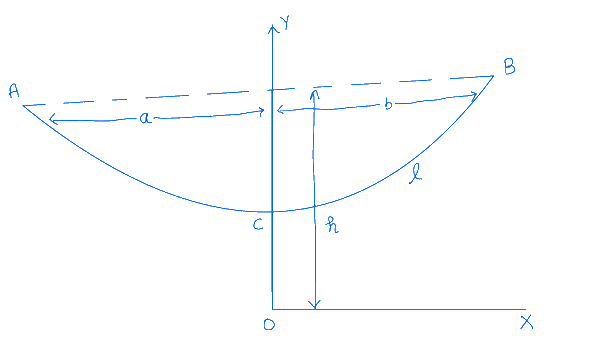
Question:-06(a) A cable of weight w per unit length and length 2l2 l hangs from two points P\mathrm{P} and Q\mathrm{Q} in the same horizontal line. Show that the span of the cable is 2l(1-(2h^(2))/(3l^(2)))2 l\left(1-\frac{2 h^2}{3 l^2}\right), where hh is the sag in the middle of the tightly stretched position.
Answer:
Introduction
The problem involves a cable of weight ww per unit length and length 2l2l hanging from two points PP and QQ in the same horizontal line. We are asked to show that the span of the cable is 2l(1-(2h^(2))/(3l^(2)))2l\left(1-\frac{2 h^2}{3 l^2}\right), where hh is the sag in the middle of the tightly stretched position.
Assumptions
The cable hangs from two points PP and QQ in the same horizontal line.
The length of the cable is 2l2l.
The sag in the middle of the tightly stretched position is hh.
Definitions
ww: Weight per unit length of the cable.
ll: Half the length of the cable.
hh: Sag in the middle of the tightly stretched position.
cc: Constant related to the shape of the cable.
ss: Arc length along the cable.
aa: Span of the cable.
Method/Approach
We will use the equations that describe the shape of the cable and its properties to find the span aa in terms of ll and hh.
We know that y^(2)=c^(2)+s^(2)y^2=c^2+s^2
At the point B, y=c+hy=c+h and s=ls=l
Therefore (c+h)^(2)=c^(2)+l^(2)(c+h)^2=c^2+l^2
Or h^(2)+2ch=l^(2)h^2+2 c h=l^2
C=(l^(2)-h^(2))/(2h)” or “(l)/(c)=(2lh)/(l^(2)-h^(2))rarr” (1) “C=\frac{l^2-h^2}{2 h} \text { or } \frac{l}{c}=\frac{2 l h}{l^2-h^2} \rightarrow \text { (1) }
We know that s=c sinh((x)/(c))s=c \sinh \left(\frac{x}{c}\right)
At the point BB, l=c sinh((a)/(c))l=c \sinh \left(\frac{a}{c}\right) or (l)/(c)=(e^((a)/(c))-e^(-((a)/(2))))/(2)[:}\frac{l}{c}=\frac{e^{\frac{a}{c}}-e^{-\left(\frac{a}{2}\right)}}{2}\left[\right. by defination, {: sinh x=(1)/(2)(e^(x)-e^(-x))]\left.\sinh x=\frac{1}{2}\left(e^x-e^{-x}\right)\right]
Or (2l)/(c)=e^((a)/(c))-(1)/(e^((a)/(2)))\frac{2 l}{c}=e^{\frac{a}{c}}-\frac{1}{e^{\frac{a}{2}}} or e^((2a)/(c))-2(l)/(c)e^((a)/( tau))-1=0e^{\frac{2 a}{c}}-2 \frac{l}{c} e^{\frac{a}{\tau}}-1=0
This is a quadratic equation for e^((a)/(2))e^{\frac{a}{2}}, whose positive root is given by
e^((a)/(c))=(l)/(c)+sqrt((l^(2))/(c^(2))+1)” or “(a)/(c)=log((l)/(c)+sqrt(1+(l^(2))/(c^(2))))rarr(2)e^{\frac{a}{c}}=\frac{l}{c}+\sqrt{\frac{l^2}{c^2}+1} \text { or } \frac{a}{c}=\log \left(\frac{l}{c}+\sqrt{1+\frac{l^2}{c^2}}\right) \rightarrow(2)
Therefore, (l)/(c)+sqrt(1+(l^(2))/(c^(2)))=(2lh)/(l^(2)-h^(2))+(l^(2)+h^(2))/(l^(2)-h^(2)),by(1)\frac{l}{c}+\sqrt{1+\frac{l^2}{c^2}}=\frac{2 l h}{l^2-h^2}+\frac{l^2+h^2}{l^2-h^2}, b y(1) and (3)
Now log((l+h)/(l-h))=log((1+(h)/(l))/(1-(h)/(l)))rarr\log \frac{l+h}{l-h}=\log \frac{1+\frac{h}{l}}{1-\frac{h}{l}} \rightarrow (7)
If the ratio (h)/(l)\frac{h}{l} is small, then by (6) and (7)
We have shown that the span of the cable is 2l(1-(2h^(2))/(3l^(2)))2l\left(1-\frac{2 h^2}{3 l^2}\right), where hh is the sag in the middle of the tightly stretched position.
Question:-06(b) प्राचल-विचरण विधि का उपयोग करके, निम्नलिखित अवकल समीकरण :
(x^(2)-1)(d^(2)y)/(dx^(2))-2x(dy)/(dx)+2y=(x^(2)-1)^(2)\left(x^2-1\right) \frac{d^2 y}{d x^2}-2 x \frac{d y}{d x}+2 y=\left(x^2-1\right)^2
को हल कीजिए, जहाँ समानीत समीकरण का एक हल y=x\mathrm{y}=\mathrm{x} दिया गया है ।
Question:-06(b) Solve the following differential equation by using the method of variation of parameters : (x^(2)-1)(d^(2)y)/(dx^(2))-2x(dy)/(dx)+2y=(x^(2)-1)^(2)\left(x^2-1\right) \frac{d^2 y}{d x^2}-2 x \frac{d y}{d x}+2 y=\left(x^2-1\right)^2, given that y=x\mathrm{y}=\mathrm{x} is one solution of the reduced equation.
Answer:
Introduction
We are given a second-order differential equation and one of its solutions. Our task is to find the general solution using the method of variation of parameters.
Assumptions
y=xy = x is a solution of the reduced equation.
We will use the method of variation of parameters to find the general solution.
Definitions
yy: Dependent variable
xx: Independent variable
P,Q,RP, Q, R: Coefficients in the differential equation
u,vu, v: Variables used in the method of variation of parameters
ww: Wronskian determinant
A,BA, B: Constants used in the method of variation of parameters
Method/Approach
We’ll first rewrite the given differential equation in a standard form. Then, we’ll apply the method of variation of parameters to find the general solution.
We have successfully solved the given differential equation using the method of variation of parameters. The general solution is y=c_(1)(x^(2)+1)+c_(2)x+(x^(4))/(6)-(x^(2))/(3)y = c_1(x^2+1) + c_2x + \frac{x^4}{6} – \frac{x^2}{3}.
Question:-06(c) समतल में ग्रीन के प्रमेय को oint_(C)(3x^(2)-8y^(2))dx+(4y-6xy)dy\oint_{\mathrm{C}}\left(3 \mathrm{x}^2-8 \mathrm{y}^2\right) \mathrm{dx}+(4 \mathrm{y}-6 \mathrm{xy}) \mathrm{dy} के लिए सत्यापित कीजिए, जहाँ C,x=0,y=0,x+y=1\mathrm{C}, \mathrm{x}=0, \mathrm{y}=0, \mathrm{x}+\mathrm{y}=1 द्वारा परिभाषित क्षेत्र का सीमा वक्र है ।
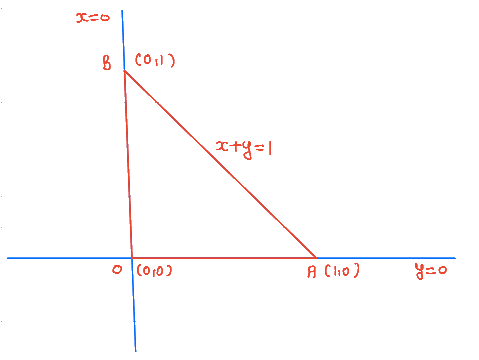
Question:-06(c)Verify Green’s theorem in the plane for oint_(C)(3x^(2)-8y^(2))dx+(4y-6xy)dy\oint_C\left(3 x^2-8 y^2\right) d x+(4 y-6 x y) d y, where C\mathrm{C} is the boundary curve of the region defined by x=0,y=0\mathrm{x}=0, \mathrm{y}=0, x+y=1x+y=1
Answer:
Introduction
We are tasked with verifying Green’s theorem for a given vector field and a specific region in the plane. Green’s theorem relates a line integral around a closed curve CC to a double integral over the plane region RR bounded by CC.
Assumptions
The curve CC is positively oriented.
CC is the boundary of the region RR, defined by x=0x=0, y=0y=0, and x+y=1x+y=1.
Definitions
M=3x^(2)-8y^(2)M = 3x^2 – 8y^2
N=4y-6xyN = 4y – 6xy
RR: The region bounded by CC
CC: The closed curve consisting of three line segments OAOA, ABAB, and BOBO
Calculate (del N)/(del x)-(del M)/(del y)\frac{\partial N}{\partial x} – \frac{\partial M}{\partial y} and integrate it over the region RR.
Evaluate the line integral oint_(C)(Mdx+Ndy)\oint_C (M dx + N dy) along the curve CC.
Compare the two results to verify Green’s theorem.
Work/Calculations
Here M=3x^(2)-8y^(2),N=4y-6xyM=3 x^2-8 y^2, N=4 y-6 x y
The closed curve C\mathrm{C} consists of the straight-line OA\mathrm{OA}, the straight-line AB\mathrm{AB} and straight-line BO\mathrm{BO}. The positive direction is traversing C\mathrm{C} is as shown in the figure and R\mathrm{R} is the region bounded by c\mathrm{c}.
We have ∬_(R)((del N)/(del x)-(del M)/(del y))dxdy=∬_(R)[(del)/(del x)(4y-2xy)-(del)/(del y)(3x^(2)-8y^(2))]dxdy\iint_R\left(\frac{\partial N}{\partial x}-\frac{\partial M}{\partial y}\right) \mathbf{d} x \mathbf{d} y=\iint_R\left[\frac{\partial}{\partial x}(4 y-2 x y)-\frac{\partial}{\partial y}\left(3 x^2-8 y^2\right)\right] \mathbf{d} x \mathbf{d} y =∬_(R)[-6y+16 y]dxdy=10∬_(R)ydxdy=10int_(x=0)^(1)int_(y=0)^(1-x)ydxdy=\iint_R[-6 y+16 y] \mathbf{d} x \mathbf{d} y=10 \iint_R y \mathbf{d} x \mathbf{d} y=10 \int_{x=0}^1 \int_{y=0}^{1-x} y \mathbf{d} x \mathbf{d} y
For the region R,x\mathrm{R}, \mathrm{x} varies from o to 1 and y\mathrm{y} varies from o\mathrm{o} to 1-x1-\mathrm{x}
=10int_(0)^(1)[(y^(2))/(2)]_(y=0)^(1-x)dx=10 \int_0^1\left[\frac{y^2}{2}\right]_{y=0}^{1-x} \mathbf{d} x, integrating with respect to y\mathrm{y} regarding x\mathrm{x} as constant
From (1) and (2), we see that Green’s theorem is verified
Step 3: Verification
Both the double integral over RR and the line integral along CC yield (5)/(3)\frac{5}{3}, verifying Green’s theorem.
Conclusion
We have successfully verified Green’s theorem for the given vector field and region. Both the double integral over the region RR and the line integral along the curve CC resulted in (5)/(3)\frac{5}{3}, confirming that Green’s theorem holds in this case.
Question:-07(a) स्टोक्स प्रमेय को vec(F)=x hat(i)+z^(2) hat(j)+y^(2) hat(k)\overrightarrow{\mathrm{F}}=\mathrm{x} \hat{\mathrm{i}}+\mathrm{z}^2 \hat{\mathrm{j}}+\mathrm{y}^2 \hat{\mathrm{k}} के लिए प्रथम अष्टांशक में स्थित समतल पृष्ठ : x+y+z=1x+y+z=1 पर सत्यापित कीजिए ।
Question:-07(a) Verify Stokes’ theorem for vec(F)=x hat(i)+z^(2) hat(j)+y^(2) hat(k)\vec{F}=x \hat{i}+z^2 \hat{j}+y^2 \hat{k} over the plane surface : x+y+z=1x+y+z=1 lying in the first octant.
Answer:
Introduction:
In this analysis, we aim to verify Stokes’ theorem for the given vector field vec(F)=x hat(i)+z^(2) hat(j)+y^(2) hat(k)\vec{F} = x\hat{i} + z^2\hat{j} + y^2\hat{k} over a specific plane surface. Stokes’ theorem relates the circulation of a vector field along a closed curve to the flux of its curl through a surface bounded by that curve. The surface of interest is defined by x+y+z=1x+y+z=1 and lies in the first octant.
The problem at hand is to verify Stokes’ theorem for the given vector field vec(F)=x hat(i)+z^(2) hat(j)+y^(2) hat(k)\vec{F} = x\hat{i} + z^2\hat{j} + y^2\hat{k} over the plane surface defined by x+y+z=1x+y+z=1 in the first octant.
The surface is defined by phi=x+y+z-1=0\phi = x+y+z – 1 = 0. The gradient of phi\phi is grad phi= hat(i)+ hat(j)+ hat(k)\nabla \phi = \hat{i} + \hat{j} + \hat{k}.
After carefully evaluating both sides of Stokes’ theorem, we find that the line integral of vec(F)\vec{F} around the closed curve CC is equal to zero. This is in agreement with the flux of grad xx vec(F)\nabla \times \vec{F} through the surface SS. Therefore, we have successfully verified Stokes’ theorem for the given vector field and surface in the first octant.
Question:-07(b) लाप्लास रूपांतरण का उपयोग करके निम्नलिखित प्रारंभिक मान समस्या : (d^(2)y)/(dt^(2))-3(dy)/(dt)+2y=h(t)\frac{\mathrm{d}^2 \mathrm{y}}{\mathrm{dt}^2}-3 \frac{\mathrm{dy}}{\mathrm{dt}}+2 \mathrm{y}=\mathrm{h}(\mathrm{t}), जहाँ h(t)={[2″,”,0 < t < 4″,”],[0″,”,t > 4″,”]y(0)=0,y^(‘)(0)=0:}\mathrm{h}(\mathrm{t})=\left\{\begin{array}{cc}2, & 0<\mathrm{t}<4, \\ 0, & \mathrm{t}>4,\end{array} \mathrm{y}(0)=0, \mathrm{y}^{\prime}(0)=0\right. को हल कीजिए।
Question:-07(b) Solve the following initial value problem by using Laplace’s transformation (d^(2)y)/(dt^(2))-3(dy)/(dt)+2y=h(t)\frac{\mathrm{d}^2 \mathrm{y}}{\mathrm{dt}^2}-3 \frac{\mathrm{dy}}{\mathrm{dt}}+2 \mathrm{y}=\mathrm{h}(\mathrm{t}), where
The problem is an initial value problem (IVP) involving a second-order linear ordinary differential equation (ODE) with a piecewise-defined forcing function h(t)h(t). The equation is:
The function h(t)h(t) is piecewise-defined. It can be represented as h(t)=2u(t)-2u(t-4)h(t) = 2u(t) – 2u(t-4), where u(t)u(t) is the unit step function.
Here, u(t-4)u(t-4) is a unit step function that becomes 1 for t >= 4t \geq 4 and is zero for t < 4t < 4. It "turns on" the terms 2e^(t-4)-e^(2t-4)2e^{t-4} – e^{2t-4} when t >= 4t \geq 4, reflecting the change in h(t)h(t) at that time.
This function satisfies the given differential equation and initial conditions. We’ve gone through each step in detail, including the inverse Laplace transform and the role of the unit step function u(t-4)u(t-4), to arrive at the final solution.
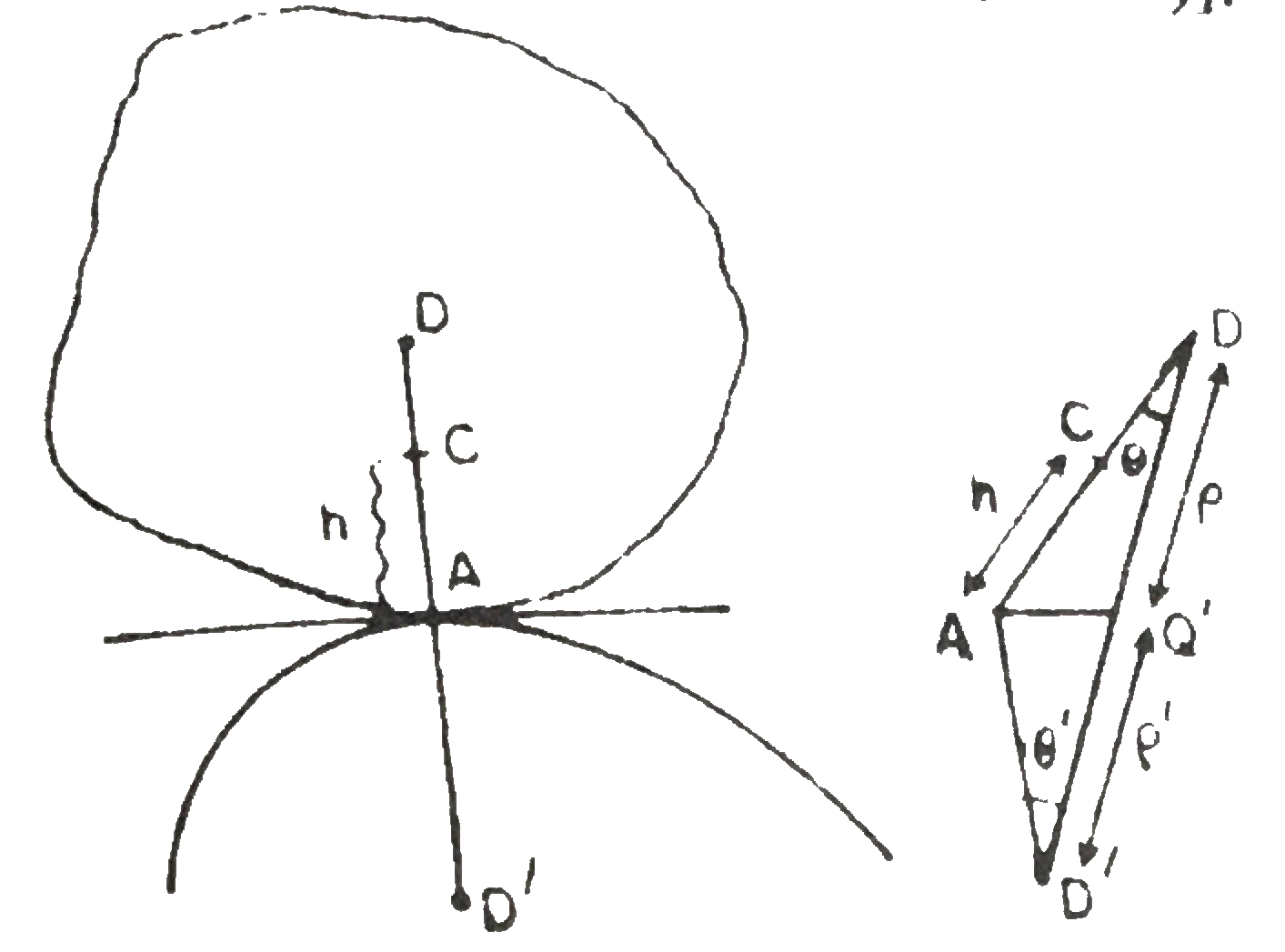
Question:-07(c) माना किसी भी अनुप्रस्थ-काट का एक बेलन दूसरे स्थिर बेलन पर संतुलित है, जहाँ वक्रीय पृष्ठों का संस्पर्श रूक्ष है तथा उभयनिष्ठ स्पर्श-रेखा क्षैतिज है । माना दोनों बेलनों के स्पर्श बिन्दु पर उनकी वक्रता त्रिज्याएँ rho\rho तथा rho^(‘)\rho^{\prime} हैं और संस्पर्श बिन्दु से ऊपरी बेलन के गुरुत्व केन्द्र की ऊँचाई h\mathrm{h} है । दर्शाइए कि स्थायी साम्य में ऊपरी बेलन संतुलित है यदि h < (rhorho^(‘))/(rho+rho^(‘))\mathrm{h}<\frac{\rho \rho^{\prime}}{\rho+\rho^{\prime}} ।
Question:-07(c) Suppose a cylinder of any cross-section is balanced on another fixed cylinder, the contact of curved surfaces being rough and the common tangent line horizontal. Let rho\rho and rho^(‘)\rho^{\prime} be the radii of curvature of the two cylinders at the point of contact and hh be the height of centre of gravity of the upper cylinder above the point of contact. Show that the upper cylinder is balanced in stable equilibrium if h < (rhorho^(‘))/(rho+rho^(‘))\mathrm{h}<\frac{\rho \rho^{\prime}}{\rho+\rho^{\prime}}.
Answer:
Introduction
The problem is about two cylinders in contact with each other. One cylinder is balanced on top of another fixed cylinder. The point where they touch is called the point of contact. The problem asks us to show that the upper cylinder is in stable equilibrium under certain conditions. Specifically, we need to prove that the upper cylinder will be stable if the height hh of its center of gravity above the point of contact is less than (rhorho^(‘))/(rho+rho^(‘))\frac{\rho \rho’}{\rho + \rho’}, where rho\rho and rho^(‘)\rho’ are the radii of curvature for the two cylinders at the point of contact.
Work/Calculations
Step 1: Define Variables and Initial Conditions
Let DD and D^(‘)D’ be the centers of curvature of the sections of the cylinders at the point of contact AA. Then AD=rhoAD = \rho and AD^(‘)=rho^(‘)AD’ = \rho’. Let AC=hAC = h, where CC is the center of gravity of the upper cylinder.
Step 2: Displacement of the Upper Cylinder
Suppose the upper cylinder is slightly displaced, and the point of contact AA moves through a small angle theta^(‘)\theta’ about D^(‘)D’. The line DCDC makes a small angle theta\theta with DD^(‘)DD’.
Since theta\theta and theta^(‘)\theta’ are small, we can approximate the sections near AA as circular arcs with radii rho\rho and rho^(‘)\rho’. Therefore, we have:
V=(1)/(2)Wtheta^(‘2)[(rho+rho^(‘))/(rho)]^(2)[(rhorho^(‘))/(rho+rho^(‘))-h]+CV = \frac{1}{2} W \theta’^2 \left[ \frac{\rho + \rho’}{\rho} \right]^2 \left[ \frac{\rho \rho’}{\rho + \rho’} – h \right] + C
Step 6: Conditions for Stable Equilibrium
For stable equilibrium, (dV)/(dtheta^(‘))=0\frac{dV}{d\theta’} = 0 and (d^(2)V)/(dtheta^(‘2)) > 0\frac{d^2V}{d\theta’^2} > 0.
(dV)/(dtheta^(‘))=W((rho+rho^(‘))/(rho))^(2)theta^(‘)[(rhorho^(‘))/(rho+rho^(‘))-h]\frac{dV}{d\theta’} = W \left( \frac{\rho + \rho’}{\rho} \right)^2 \theta’ \left[ \frac{\rho \rho’}{\rho + \rho’} – h \right]
(d^(2)V)/(dtheta^(‘2))=W((rho+rho^(‘))/(rho))^(2)[(rhorho^(‘))/(rho+rho^(‘))-h]\frac{d^2V}{d\theta’^2} = W \left( \frac{\rho + \rho’}{\rho} \right)^2 \left[ \frac{\rho \rho’}{\rho + \rho’} – h \right]
Now, for theta^(‘)=0\theta’ = 0, the first derivative (dV)/(dtheta^(‘))=0\frac{dV}{d\theta’} = 0, indicating that it is a position of equilibrium.
Also, at theta^(‘)=0\theta’ = 0, the second derivative (d^(2)V)/(dtheta^(‘2)) > 0\frac{d^2V}{d\theta’^2} > 0 if (rhorho^(‘))/(rho+rho^(‘)) > h\frac{\rho \rho’}{\rho + \rho’} > h.
This confirms that h < (rhorho^(‘))/(rho+rho^(‘))h < \frac{\rho \rho’}{\rho + \rho’} for stable equilibrium.
Conclusion
We have shown that the upper cylinder will be in stable equilibrium if the height hh of its center of gravity above the point of contact is less than (rhorho^(‘))/(rho+rho^(‘))\frac{\rho \rho’}{\rho + \rho’}. This was achieved by calculating the potential energy, simplifying it, and applying conditions for stable equilibrium.
Question:-08(a) (i) अवकल समीकरण : (x^(2)-a^(2))p^(2)-2xyp+y^(2)+a^(2)=0\left(\mathrm{x}^2-\mathrm{a}^2\right) \mathrm{p}^2-2 \mathrm{xyp}+\mathrm{y}^2+\mathrm{a}^2=0, जहाँ p=(dy)/(dx)\mathrm{p}=\frac{\mathrm{dy}}{\mathrm{dx}}, के व्यापक व विचित्र हलों को ज्ञात कीजिए । व्यापक व विचित्र हलों के बीच ज्यामितीय संबंध को भी दीजिए ।
Question8(a) (i) Find the general and singular solutions of the differential equation: (x^(2)-a^(2))p^(2)-2xyp+y^(2)+a^(2)=0\left(x^2-a^2\right) p^2-2 x y p+y^2+a^2=0, where p=(dy)/(dx)p=\frac{d y}{d x}. Also give the geometric relation between the general and singular solutions.
Answer:
Introduction
The problem asks us to find both the general and singular solutions of a given differential equation (x^(2)-a^(2))p^(2)-2xyp+y^(2)+a^(2)=0\left(x^2-a^2\right) p^2-2 x y p+y^2+a^2=0, where p=(dy)/(dx)p = \frac{dy}{dx}. Additionally, we are asked to describe the geometric relationship between these solutions.
Work/Calculations
Step 1: Given Differential Equation
The differential equation provided is:
(x^(2)-a^(2))p^(2)-2xyp+y^(2)+a^(2)=0quad(Equation 1)\left(x^2-a^2\right) p^2-2 x y p+y^2+a^2=0 \quad \text{(Equation 1)}
Equation 3 is the same as the c-discriminant and satisfies the given ODE. Therefore, Equation 3 is the singular solution of Equation 1. The geometric relation between the general and singular solutions is that they are envelopes of each other, represented by a hyperbola curve.
Conclusion
We found both the general and singular solutions for the given differential equation. The general solution is y=xc+-asqrt(c^(2)-1)y = xc \pm a \sqrt{c^2 – 1}, and the singular solution is x^(2)-y^(2)=a^(2)x^2 – y^2 = a^2. The geometric relationship between these solutions is that they are envelopes of each other, represented by a hyperbola curve.
Question:-08(a) (ii) निम्नलिखित अवकल समीकरण को हल कीजिए :
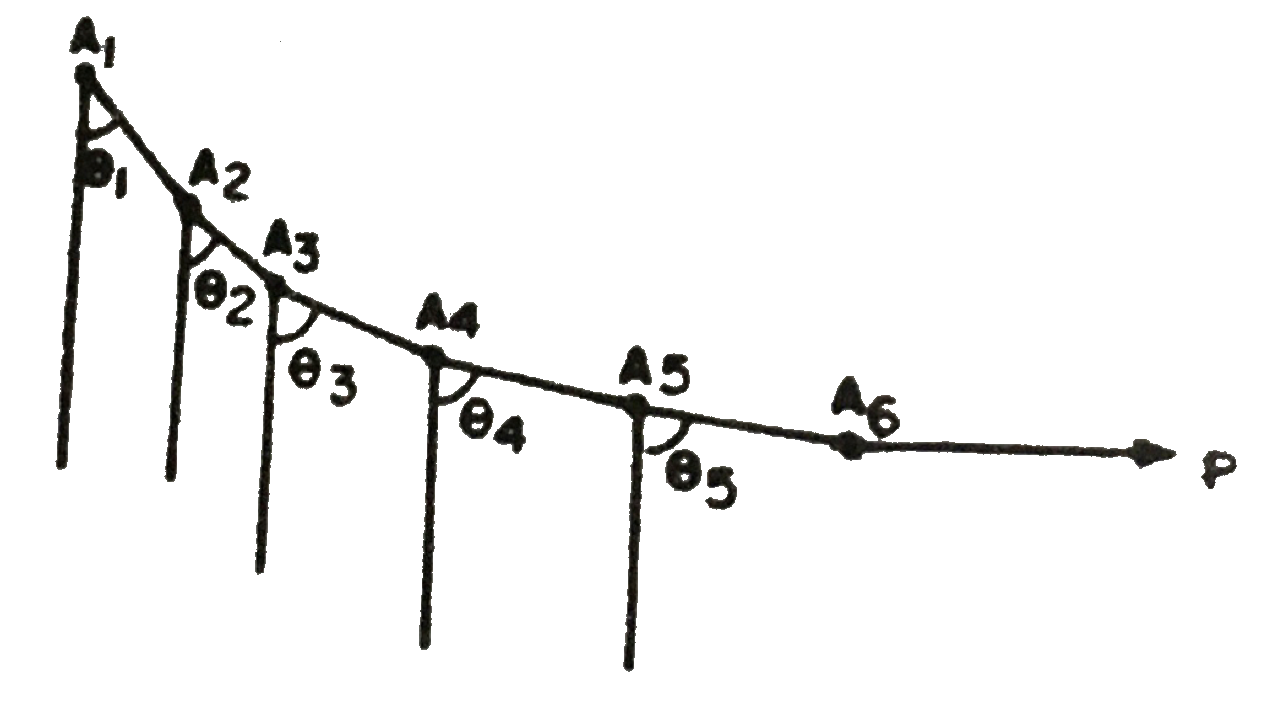
Question:-08(b) n\mathrm{n} बराबर एकसमान छड़ों की एक श्रृंखला एक-दूसरे के साथ चिकने रूप से जुड़ी हुई है तथा इसके एक सिरे A_(1)\mathrm{A}_1 से लटकी हुई है । एक क्षैतिज बल vec(P)\overrightarrow{\mathrm{P}} शृंखला के दूसरे सिरे A_(n+1)\mathrm{A}_{\mathrm{n}+1} पर लगाया गया है । साम्य विन्यास में अधोमुखी ऊर्ध्वाधर रेखा से छड़ों के झुकाव ज्ञात कीजिए ।
Question:-08(b) A chain of n\mathrm{n} equal uniform rods is smoothly jointed together and suspended from its one end A_(1)\mathrm{A}_1. A horizontal force vec(P)\overrightarrow{\mathrm{P}} is applied to the other end A_(n+1)\mathrm{A}_{\mathrm{n}+1} of the chain. Find the inclinations of the rods to the downward vertical line in the equilibrium configuration.
Answer:
Consider a chain of nn equal uniform rods smoothly jointed together and suspended from one end (denoted as A_(1)A_1). A horizontal force vec(P)\overrightarrow{P} is applied to the other end (A_(n+1)A_{n+1}) of the chain. We need to find the inclinations of the rods to the downward vertical line in the equilibrium configuration.
Each rod has length 2a2a and weight ww. The potential energy in a general configuration is given by:
V=-wa cos theta_(1)-w(2a cos theta_(1)+a cos theta_(2))-dotsV = -w a \cos \theta_1 – w (2a \cos \theta_1 + a \cos \theta_2) – \ldots
-w(2a cos theta_(1)+2a cos theta_(2)+dots+2a cos theta_(n-1)+a cos theta _(n))-w (2a \cos \theta_1 + 2a \cos \theta_2 + \ldots + 2a \cos \theta_{n-1} + a \cos \theta_n)
Question:-08(c) गाउस के अपसरण प्रमेय का उपयोग करके ∬_(S) vec(F)* vec(n)dS\iint_{\mathrm{S}} \overrightarrow{\mathrm{F}} \cdot \overrightarrow{\mathrm{n}} \mathrm{dS} का मान निकालिए, जहाँ vec(F)=x hat(i)-y hat(j)+(z^(2)-1) hat(k)\overrightarrow{\mathrm{F}}=\mathrm{x} \hat{\mathrm{i}}-\mathrm{y} \hat{\mathrm{j}}+\left(\mathrm{z}^2-1\right) \hat{\mathrm{k}} तथा S\mathrm{S}, पृष्ठों z=0,z=1,x^(2)+y^(2)=4\mathrm{z}=0, \mathrm{z}=1, \mathrm{x}^2+\mathrm{y}^2=4 द्वारा बना हुआ बेलन है ।
Question:-08(c) Using Gauss’ divergence theorem, evaluate ∬_(S) vec(F)* vec(n)dS\iint_S \vec{F} \cdot \vec{n} d S, where vec(F)=x hat(i)-y hat(j)+(z^(2)-1) hat(k)\vec{F}=x \hat{i}-y \hat{j}+\left(z^2-1\right) \hat{k} and SS is the cylinder formed by the surfaces z=0,z=1,x^(2)+y^(2)=4z=0, z=1, x^2+y^2=4.
Answer:
Step 1 – Gauss’ Divergence Theorem:
We begin by applying Gauss’ Divergence Theorem, which connects the surface integral to a triple integral:
This gives us the expression for the divergence of vec(F)\vec{F}.
Step 3 – Triple Integral Setup:
Next, we set up the triple integral to calculate ∭_(V)div vec(F)dV\iiint_V \operatorname{div} \vec{F} \, dV. We integrate with respect to zz from 0 to 1, yy from -2 to 2, and xx from -sqrt(4-y^(2))-\sqrt{4-y^2} to sqrt(4-y^(2))\sqrt{4-y^2}.
Step 4 – Integral Calculation (Part 1):
We start by integrating with respect to xx from -sqrt(4-y^(2))-\sqrt{4-y^2} to sqrt(4-y^(2))\sqrt{4-y^2}: