UPSC M2020-1 WS
खण्ड-A / SECTION-A
(a) माना समुच्चय
V
V
V V V
n
×
n
n
×
n
n xx n n \times n n × n
V
,
R
V
,
R
V,R V, R V , R
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 Consider the set
V
V
V V V of all
n
×
n
n
×
n
n xx n n \times n n × n real magic squares. Show that
V
V
V V V is a vector space over
R
R
R R R . Give examples of two distinct
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 magic squares.
Answer:
Introduction The problem asks us to prove that the set
V
V
V V V of all
n
×
n
n
×
n
n xx n n \times n n × n real magic squares is a vector space over
R
R
R \mathbb{R} R . A magic square is a square grid of numbers such that the sums of the numbers in each row, each column, and both main diagonals are the same. We will use the properties of vector spaces to prove this.
To make the proof more explicit, let’s assume
X
,
Y
,
X
,
Y
,
X,Y, X, Y, X , Y , and
Z
Z
Z Z Z are
n
×
n
n
×
n
n xx n n \times n n × n magic squares with general entries as follows:
X
=
[
x
11
x
12
x
13
…
x
1
n
x
21
x
22
x
23
…
x
2
n
⋮
⋮
⋮
⋱
⋮
x
n
1
x
n
2
x
n
3
…
x
n
n
]
X
=
x
11
x
12
x
13
…
x
1
n
x
21
x
22
x
23
…
x
2
n
⋮
⋮
⋮
⋱
⋮
x
n
1
x
n
2
x
n
3
…
x
n
n
X=[[x_(11),x_(12),x_(13),dots,x_(1n)],[x_(21),x_(22),x_(23),dots,x_(2n)],[vdots,vdots,vdots,ddots,vdots],[x_(n1),x_(n2),x_(n3),dots,x_(nn)]] X=\left[\begin{array}{ccccc}
x_{11} & x_{12} & x_{13} & \ldots & x_{1n} \\
x_{21} & x_{22} & x_{23} & \ldots & x_{2n} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
x_{n1} & x_{n2} & x_{n3} & \ldots & x_{nn}
\end{array}\right] X = [ x 11 x 12 x 13 … x 1 n x 21 x 22 x 23 … x 2 n ⋮ ⋮ ⋮ ⋱ ⋮ x n 1 x n 2 x n 3 … x n n ]
Y
=
[
y
11
y
12
y
13
…
y
1
n
y
21
y
22
y
23
…
y
2
n
⋮
⋮
⋮
⋱
⋮
y
n
1
y
n
2
y
n
3
…
y
n
n
]
Y
=
y
11
y
12
y
13
…
y
1
n
y
21
y
22
y
23
…
y
2
n
⋮
⋮
⋮
⋱
⋮
y
n
1
y
n
2
y
n
3
…
y
n
n
Y=[[y_(11),y_(12),y_(13),dots,y_(1n)],[y_(21),y_(22),y_(23),dots,y_(2n)],[vdots,vdots,vdots,ddots,vdots],[y_(n1),y_(n2),y_(n3),dots,y_(nn)]] Y=\left[\begin{array}{ccccc}
y_{11} & y_{12} & y_{13} & \ldots & y_{1n} \\
y_{21} & y_{22} & y_{23} & \ldots & y_{2n} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
y_{n1} & y_{n2} & y_{n3} & \ldots & y_{nn}
\end{array}\right] Y = [ y 11 y 12 y 13 … y 1 n y 21 y 22 y 23 … y 2 n ⋮ ⋮ ⋮ ⋱ ⋮ y n 1 y n 2 y n 3 … y n n ]
Z
=
[
z
11
z
12
z
13
…
z
1
n
z
21
z
22
z
23
…
z
2
n
⋮
⋮
⋮
⋱
⋮
z
n
1
z
n
2
z
n
3
…
z
n
n
]
Z
=
z
11
z
12
z
13
…
z
1
n
z
21
z
22
z
23
…
z
2
n
⋮
⋮
⋮
⋱
⋮
z
n
1
z
n
2
z
n
3
…
z
n
n
Z=[[z_(11),z_(12),z_(13),dots,z_(1n)],[z_(21),z_(22),z_(23),dots,z_(2n)],[vdots,vdots,vdots,ddots,vdots],[z_(n1),z_(n2),z_(n3),dots,z_(nn)]] Z=\left[\begin{array}{ccccc}
z_{11} & z_{12} & z_{13} & \ldots & z_{1n} \\
z_{21} & z_{22} & z_{23} & \ldots & z_{2n} \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
z_{n1} & z_{n2} & z_{n3} & \ldots & z_{nn}
\end{array}\right] Z = [ z 11 z 12 z 13 … z 1 n z 21 z 22 z 23 … z 2 n ⋮ ⋮ ⋮ ⋱ ⋮ z n 1 z n 2 z n 3 … z n n ] And let
a
a
a a a and
b
b
b b b be real numbers.
Work/Calculations Property 1: Closure under Addition and Scalar Multiplication
X
+
Y
∈
MS
(
n
)
X
+
Y
∈
MS
(
n
)
X+Y in MS(n) X + Y \in \operatorname{MS}(n) X + Y ∈ MS ( n ) Let’s substitute the values:
(
X
+
Y
)
=
[
x
i
j
+
y
i
j
]
(
X
+
Y
)
=
[
x
i
j
+
y
i
j
]
(X+Y)=[x_(ij)+y_(ij)] (X + Y) = [x_{ij} + y_{ij}] ( X + Y ) = [ x i j + y i j ] The sum of each row, column, and diagonal in
X
X
X X X and
Y
Y
Y Y Y is the same constant
k
k
k k k . Therefore, the sum of each corresponding row, column, and diagonal in
X
+
Y
X
+
Y
X+Y X + Y X + Y will be
2
k
2
k
2k 2k 2 k , which means
X
+
Y
X
+
Y
X+Y X + Y X + Y is also a magic square.
a
X
∈
MS
(
n
)
a
X
∈
MS
(
n
)
aX in MS(n) aX \in \operatorname{MS}(n) a X ∈ MS ( n ) Let’s substitute the values:
a
X
=
[
a
x
i
j
]
a
X
=
[
a
x
i
j
]
aX=[ax_(ij)] aX = [ax_{ij}] a X = [ a x i j ] If we multiply
X
X
X X X by a scalar
a
a
a a a , each row, column, and diagonal sum becomes
a
k
a
k
ak ak a k , which means
a
X
a
X
aX aX a X is also a magic square.
After calculating, we find that both
X
+
Y
X
+
Y
X+Y X + Y X + Y and
a
X
a
X
aX aX a X are in
MS
(
n
)
MS
(
n
)
MS(n) \operatorname{MS}(n) MS ( n ) , proving closure under addition and scalar multiplication.
Property 2: Commutativity of Addition
X
+
Y
=
Y
+
X
X
+
Y
=
Y
+
X
X+Y=Y+X X + Y = Y + X X + Y = Y + X This is straightforward because matrix addition is commutative.
Property 3: Associativity of Addition
X
+
(
Y
+
Z
)
=
(
X
+
Y
)
+
Z
X
+
(
Y
+
Z
)
=
(
X
+
Y
)
+
Z
X+(Y+Z)=(X+Y)+Z X + (Y + Z) = (X + Y) + Z X + ( Y + Z ) = ( X + Y ) + Z Matrix addition is associative, so this property holds.
Property 4: Existence of Zero Vector Let
0
0
0 \mathbf{0} 0 be the
n
×
n
n
×
n
n xx n n \times n n × n magic square where every entry is zero. Then,
X
+
0
=
0
+
X
=
X
X
+
0
=
0
+
X
=
X
X+0=0+X=X X + \mathbf{0} = \mathbf{0} + X = X X + 0 = 0 + X = X Property 5: Existence of Additive Inverse Let
X
′
=
−
X
X
′
=
−
X
X^(‘)=-X X’ = -X X ′ = − X . Then,
X
+
X
′
=
X
′
+
X
=
0
X
+
X
′
=
X
′
+
X
=
0
X+X^(‘)=X^(‘)+X=0 X + X’ = X’ + X = \mathbf{0} X + X ′ = X ′ + X = 0 Property 6: Distributive Law 1
a
(
X
+
Y
)
=
a
X
+
a
Y
a
(
X
+
Y
)
=
a
X
+
a
Y
a(X+Y)=aX+aY a(X + Y) = aX + aY a ( X + Y ) = a X + a Y This is a property of matrices, so it holds.
Property 7: Distributive Law 2
(
a
+
b
)
X
=
a
X
+
b
X
(
a
+
b
)
X
=
a
X
+
b
X
(a+b)X=aX+bX (a + b)X = aX + bX ( a + b ) X = a X + b X This is also a property of matrices.
Property 8: Associativity of Scalar Multiplication
(
a
b
)
X
=
a
(
b
X
)
(
a
b
)
X
=
a
(
b
X
)
(ab)X=a(bX) (ab)X = a(bX) ( a b ) X = a ( b X ) This is true for matrices.
Property 9: Multiplication by Identity
1
X
=
X
1
X
=
X
1X=X 1X = X 1 X = X This is true for any matrix
X
X
X X X .
We have shown that the set
V
V
V V V of all
n
×
n
n
×
n
n xx n n \times n n × n real magic squares satisfies all the properties required for it to be a vector space over
R
R
R \mathbb{R} R . Therefore,
V
V
V V V is indeed a vector space over
R
R
R \mathbb{R} R .
For a
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 matrix to be a magic square, the sum of each row, each column, and both diagonals must be the same. Let’s consider a general
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 magic square
M
M
M M M with entries
a
,
b
,
c
,
a
,
b
,
c
,
a,b,c, a, b, c, a , b , c , and
d
d
d d d :
M
=
[
a
b
c
d
]
M
=
a
b
c
d
M=[[a,b],[c,d]] M = \left[\begin{array}{cc}
a & b \\
c & d
\end{array}\right] M = [ a b c d ] For
M
M
M M M to be a magic square, the following conditions must be met:
The sum of each row must be the same:
a
+
b
=
c
+
d
a
+
b
=
c
+
d
a+b=c+d a + b = c + d a + b = c + d The sum of each column must be the same:
a
+
c
=
b
+
d
a
+
c
=
b
+
d
a+c=b+d a + c = b + d a + c = b + d The sum of the diagonals must be the same:
a
+
d
=
b
+
c
a
+
d
=
b
+
c
a+d=b+c a + d = b + c a + d = b + c Example 1 Let’s choose
a
=
1
,
b
=
1
,
c
=
1
,
a
=
1
,
b
=
1
,
c
=
1
,
a=1,b=1,c=1, a = 1, b = 1, c = 1, a = 1 , b = 1 , c = 1 , and
d
=
1
d
=
1
d=1 d = 1 d = 1 . All the sums are
1
+
1
=
2
1
+
1
=
2
1+1=2 1 + 1 = 2 1 + 1 = 2 , so it’s a magic square.
M
1
=
[
1
1
1
1
]
M
1
=
1
1
1
1
M_(1)=[[1,1],[1,1]] M_1 = \left[\begin{array}{cc}
1 & 1 \\
1 & 1
\end{array}\right] M 1 = [ 1 1 1 1 ] Example 2 Let’s choose
a
=
2
,
b
=
2
,
c
=
2
,
a
=
2
,
b
=
2
,
c
=
2
,
a=2,b=2,c=2, a = 2, b = 2, c = 2, a = 2 , b = 2 , c = 2 , and
d
=
2
d
=
2
d=2 d = 2 d = 2 . All the sums are
2
+
2
=
4
2
+
2
=
4
2+2=4 2 + 2 = 4 2 + 2 = 4 , so it’s a magic square.
M
2
=
[
2
2
2
2
]
M
2
=
2
2
2
2
M_(2)=[[2,2],[2,2]] M_2 = \left[\begin{array}{cc}
2 & 2 \\
2 & 2
\end{array}\right] M 2 = [ 2 2 2 2 ] Conclusion Therefore, we conclude that the set
V
V
V V V of all
n
×
n
n
×
n
n xx n n \times n n × n real magic squares is a valid vector space over
R
R
R \mathbb{R} R . This conclusion is underpinned by the rigorous application of vector space properties and the concrete examples provided for
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 magic squares, affirming the validity of this mathematical concept.
(b) माना
M
2
(
R
)
M
2
(
R
)
M_(2)(R) M_2(R) M 2 ( R ) सभी
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 वास्तविक आव्यूहों का सदिश समष्टि है। माना
B
=
[
1
−
1
−
4
4
]
B
=
1
−
1
−
4
4
B=[[1,-1],[-4,4]] B=\left[\begin{array}{cc}1 & -1 \\ -4 & 4\end{array}\right] B = [ 1 − 1 − 4 4 ] . माना
T
:
M
2
(
R
)
→
M
2
(
R
)
T
:
M
2
(
R
)
→
M
2
(
R
)
T:M_(2)(R)rarrM_(2)(R) T: M_2(R) \rightarrow M_2(R) T : M 2 ( R ) → M 2 ( R ) एक रैखिक रूपांतरण है, जो
T
(
A
)
=
B
A
T
(
A
)
=
B
A
T(A)=BA T(A)=B A T ( A ) = B A द्वारा परिभाषित है।
T
T
T T T की कोटि (रिक) व शून्यता (नलिटि) ज्ञात कीजिए। आव्यूह
A
A
A A A ज्ञात कीजिए, जो शून्य आव्यूह को प्रतिचित्रित करता है।
Let
M
2
(
R
)
M
2
(
R
)
M_(2)(R) M_2(R) M 2 ( R ) be the vector space of all
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 real matrices. Let
B
=
[
1
−
1
−
4
4
]
B
=
1
−
1
−
4
4
B=[[1,-1],[-4,4]] B=\left[\begin{array}{cc}1 & -1 \\ -4 & 4\end{array}\right] B = [ 1 − 1 − 4 4 ] . Suppose
T
:
M
2
(
R
)
→
M
2
(
R
)
T
:
M
2
(
R
)
→
M
2
(
R
)
T:M_(2)(R)rarrM_(2)(R) T: M_2(R) \rightarrow M_2(R) T : M 2 ( R ) → M 2 ( R ) is a linear transformation defined by
T
(
A
)
=
B
A
T
(
A
)
=
B
A
T(A)=BA T(A)=B A T ( A ) = B A . Find the rank and nullity of
T
T
T T T . Find a matrix
A
A
A A A which maps to the null matrix.
Answer:
Introduction We are given a vector space
M
2
(
R
)
M
2
(
R
)
M_(2)(R) M_2(\mathbb{R}) M 2 ( R ) of all
2
×
2
2
×
2
2xx2 2 \times 2 2 × 2 real matrices and a specific matrix
B
B
B B B . A linear transformation
T
:
M
2
(
R
)
→
M
2
(
R
)
T
:
M
2
(
R
)
→
M
2
(
R
)
T:M_(2)(R)rarrM_(2)(R) T: M_2(\mathbb{R}) \rightarrow M_2(\mathbb{R}) T : M 2 ( R ) → M 2 ( R ) is defined as
T
(
A
)
=
B
A
T
(
A
)
=
B
A
T(A)=BA T(A) = BA T ( A ) = B A . We are asked to find the rank and nullity of
T
T
T T T and to find a matrix
A
A
A A A that maps to the null matrix under
T
T
T T T .
Work/Calculations Finding a Matrix
A
A
A A A To find a matrix
A
A
A A A that maps to the null matrix under
T
T
T T T , we need to find
A
A
A A A such that
B
A
=
0
B
A
=
0
BA=0 BA = 0 B A = 0 .
Let
A
=
[
a
b
c
d
]
A
=
a
b
c
d
A=[[a,b],[c,d]] A = \left[\begin{array}{cc} a & b \\ c & d \end{array}\right] A = [ a b c d ] .
B
A
=
[
1
−
1
−
4
4
]
[
a
b
c
d
]
=
[
a
−
c
b
−
d
−
4
a
+
4
c
−
4
b
+
4
d
]
B
A
=
1
−
1
−
4
4
a
b
c
d
=
a
−
c
b
−
d
−
4
a
+
4
c
−
4
b
+
4
d
BA=[[1,-1],[-4,4]][[a,b],[c,d]]=[[a-c,b-d],[-4a+4c,-4b+4d]] BA = \left[\begin{array}{cc} 1 & -1 \\ -4 & 4 \end{array}\right] \left[\begin{array}{cc} a & b \\ c & d \end{array}\right] = \left[\begin{array}{cc} a – c & b – d \\ -4a + 4c & -4b + 4d \end{array}\right] B A = [ 1 − 1 − 4 4 ] [ a b c d ] = [ a − c b − d − 4 a + 4 c − 4 b + 4 d ] For
B
A
B
A
BA BA B A to be the null matrix, we need
a
−
c
=
0
a
−
c
=
0
a-c=0 a – c = 0 a − c = 0 ,
b
−
d
=
0
b
−
d
=
0
b-d=0 b – d = 0 b − d = 0 ,
−
4
a
+
4
c
=
0
−
4
a
+
4
c
=
0
-4a+4c=0 -4a + 4c = 0 − 4 a + 4 c = 0 , and
−
4
b
+
4
d
=
0
−
4
b
+
4
d
=
0
-4b+4d=0 -4b + 4d = 0 − 4 b + 4 d = 0 .
Solving these equations, we find
a
=
c
a
=
c
a=c a = c a = c and
b
=
d
b
=
d
b=d b = d b = d .
Therefore, any matrix
A
A
A A A of the form
[
a
b
a
b
]
a
b
a
b
[[a,b],[a,b]] \left[\begin{array}{cc} a & b \\ a & b \end{array}\right] [ a b a b ] will map to the null matrix under
T
T
T T T .
Nullity of
T
T
T T T The nullity of
T
T
T T T is the dimension of the null space of
T
T
T T T , denoted as
N
(
T
)
N
(
T
)
N(T) N(T) N ( T ) . The null space consists of all matrices
A
A
A A A such that
B
A
=
0
B
A
=
0
BA=0 BA = 0 B A = 0 .
Any matrix
A
A
A A A of the form
[
a
b
a
b
]
a
b
a
b
[[a,b],[a,b]] \left[\begin{array}{cc} a & b \\ a & b \end{array}\right] [ a b a b ] will map to the null matrix under
T
T
T T T .
We can express this as:
[
x
1
x
2
x
3
x
4
]
=
[
p
q
p
q
]
=
p
[
1
0
1
0
]
+
q
[
0
1
0
1
]
x
1
x
2
x
3
x
4
=
p
q
p
q
=
p
1
0
1
0
+
q
0
1
0
1
[[x_(1),x_(2)],[x_(3),x_(4)]]=[[p,q],[p,q]]=p[[1,0],[1,0]]+q[[0,1],[0,1]] \left[\begin{array}{ll}x_1 & x_2 \\ x_3 & x_4\end{array}\right]=\left[\begin{array}{ll}p & q \\ p & q\end{array}\right]=p\left[\begin{array}{ll}1 & 0 \\ 1 & 0\end{array}\right]+q\left[\begin{array}{ll}0 & 1 \\ 0 & 1\end{array}\right] [ x 1 x 2 x 3 x 4 ] = [ p q p q ] = p [ 1 0 1 0 ] + q [ 0 1 0 1 ] Thus, the null space is spanned by the matrices
[
1
0
1
0
]
1
0
1
0
[[1,0],[1,0]] \left[\begin{array}{ll}1 & 0 \\ 1 & 0\end{array}\right] [ 1 0 1 0 ] and
[
0
1
0
1
]
0
1
0
1
[[0,1],[0,1]] \left[\begin{array}{ll}0 & 1 \\ 0 & 1\end{array}\right] [ 0 1 0 1 ] , and its dimension is 2. Hence,
Nullity
(
T
)
=
2
Nullity
(
T
)
=
2
“Nullity”(T)=2 \text{Nullity}(T) = 2 Nullity ( T ) = 2 .
Rank of
T
T
T T T By the rank-nullity theorem, we have:
ρ
(
T
)
+
N
(
T
)
=
4
⟹
ρ
(
T
)
=
4
−
2
=
2
ρ
(
T
)
+
N
(
T
)
=
4
⟹
ρ
(
T
)
=
4
−
2
=
2
rho(T)+N(T)=4Longrightarrowrho(T)=4-2=2 \rho(T) + N(T) = 4 \implies \rho(T) = 4 – 2 = 2 ρ ( T ) + N ( T ) = 4 ⟹ ρ ( T ) = 4 − 2 = 2 So, the rank of
T
T
T T T is 2.
Finding Matrix
A
A
A A A Any matrix
A
A
A A A of the form
[
a
b
a
b
]
a
b
a
b
[[a,b],[a,b]] \left[\begin{array}{cc} a & b \\ a & b \end{array}\right] [ a b a b ] will map to the null matrix under
T
T
T T T .
Lets take an example :
To find out if
A
A
A A A maps to the null matrix under
T
T
T T T , we need to compute
B
A
B
A
BA BA B A .
Given
B
=
[
1
−
1
−
4
4
]
B
=
1
−
1
−
4
4
B=[[1,-1],[-4,4]] B = \left[\begin{array}{cc}1 & -1 \\ -4 & 4\end{array}\right] B = [ 1 − 1 − 4 4 ] and
A
=
[
2
3
2
3
]
A
=
2
3
2
3
A=[[2,3],[2,3]] A = \left[\begin{array}{ll}2 & 3 \\ 2 & 3\end{array}\right] A = [ 2 3 2 3 ] ,
B
A
=
[
1
−
1
−
4
4
]
[
2
3
2
3
]
=
[
0
0
0
0
]
B
A
=
1
−
1
−
4
4
2
3
2
3
=
0
0
0
0
BA=[[1,-1],[-4,4]][[2,3],[2,3]]=[[0,0],[0,0]] BA = \left[\begin{array}{cc}1 & -1 \\ -4 & 4\end{array}\right] \left[\begin{array}{ll}2 & 3 \\ 2 & 3\end{array}\right] = \left[\begin{array}{ll}0 & 0 \\ 0 & 0\end{array}\right] B A = [ 1 − 1 − 4 4 ] [ 2 3 2 3 ] = [ 0 0 0 0 ] After calculating, we find that
B
A
B
A
BA BA B A is indeed the null matrix.
Conclusion The rank of
T
T
T T T The nullity of
T
T
T T T A matrix
A
A
A A A
T
T
T T T
[
a
b
a
b
]
a
b
a
b
[[a,b],[a,b]] \left[\begin{array}{cc} a & b \\ a & b \end{array}\right] [ a b a b ]
A
=
[
2
3
2
3
]
A
=
2
3
2
3
A=[[2,3],[2,3]] A = \left[\begin{array}{ll}2 & 3 \\ 2 & 3\end{array}\right] A = [ 2 3 2 3 ] (c)
lim
x
→
π
4
(
tan
x
)
tan
2
x
lim
x
→
π
4
(
tan
x
)
tan
2
x
lim_(x rarr(pi)/(4))(tan x)^(tan 2x) \lim _{x \rightarrow \frac{\pi}{4}}(\tan x)^{\tan 2 x} lim x → π 4 ( tan x ) tan 2 x का मान निकालिए।
Evaluate
lim
x
→
π
4
(
tan
x
)
tan
2
x
lim
x
→
π
4
(
tan
x
)
tan
2
x
lim_(x rarr(pi)/(4))(tan x)^(tan 2x) \lim _{x \rightarrow \frac{\pi}{4}}(\tan x)^{\tan 2 x} lim x → π 4 ( tan x ) tan 2 x Answer:
Equations/Concepts:
Step-by-Step Explanation:
Let
y
=
(
tan
x
)
tan
2
x
y
=
(
tan
x
)
tan
2
x
y=(tan x)^(tan 2x) y=(\tan x)^{\tan 2 x} y = ( tan x ) tan 2 x .
Take the natural logarithm of both sides:
log
y
=
tan
2
x
log
tan
x
log
y
=
tan
2
x
log
tan
x
{:log y=tan 2x log tan x:} \begin{aligned}
\log y &= \tan 2 x \log \tan x
\end{aligned} log y = tan 2 x log tan x Now, let’s find the limit:
lim
x
→
π
4
log
y
=
lim
x
→
π
4
tan
2
x
log
tan
x
lim
x
→
π
4
log
y
=
lim
x
→
π
4
tan
2
x
log
tan
x
{:lim_(x rarr(pi)/(4))log y=lim_(x rarr(pi)/(4))tan 2x log tan x:} \begin{aligned}
\lim _{x \rightarrow \frac{\pi}{4}} \log y &= \lim _{x \rightarrow \frac{\pi}{4}} \tan 2 x \log \tan x
\end{aligned} lim x → π 4 log y = lim x → π 4 tan 2 x log tan x We can apply L’Hôpital’s rule here because it’s an indeterminate form (
0
0
0
0
(0)/(0) \frac{0}{0} 0 0
x
x
x x x
=
lim
x
→
π
4
log
tan
x
cot
2
x
=
lim
x
→
π
4
1
tan
x
sec
2
x
−
2
csc
2
2
x
=
lim
x
→
π
4
log
tan
x
cot
2
x
=
lim
x
→
π
4
1
tan
x
sec
2
x
−
2
csc
2
2
x
{:[=lim_(x rarr(pi)/(4))(log tan x)/(cot 2x)],[=lim_(x rarr(pi)/(4))((1)/(tan x)sec^(2)x)/(-2csc^(2)2x)]:} \begin{aligned}
&= \lim _{x \rightarrow \frac{\pi}{4}} \frac{\log \tan x}{\cot 2 x} \\
&= \lim _{x \rightarrow \frac{\pi}{4}} \frac{\frac{1}{\tan x} \sec ^2 x}{-2 \csc^2 2 x}
\end{aligned} = lim x → π 4 log tan x cot 2 x = lim x → π 4 1 tan x sec 2 x − 2 csc 2 2 x Now, substitute
x
=
π
4
x
=
π
4
x=(pi)/(4) x = \frac{\pi}{4} x = π 4
=
1
tan
π
4
sec
2
π
4
−
2
csc
2
2
π
4
=
1
⋅
2
−
2
=
−
1
=
1
tan
π
4
sec
2
π
4
−
2
csc
2
2
π
4
=
1
⋅
2
−
2
=
−
1
{:[=((1)/(tan((pi)/(4)))sec^(2)((pi)/(4)))/(-2csc^(2)2(pi)/(4))],[=(1*2)/(-2)],[=-1]:} \begin{aligned}
&= \frac{\frac{1}{\tan \frac{\pi}{4}} \sec ^2 \frac{\pi}{4}}{-2 \csc^2 2 \frac{\pi}{4}} \\
&= \frac{1 \cdot 2}{-2} \\
&= -1
\end{aligned} = 1 tan π 4 sec 2 π 4 − 2 csc 2 2 π 4 = 1 ⋅ 2 − 2 = − 1 Now, we’ve found the limit of
log
y
log
y
log y \log y log y
x
x
x x x
π
4
π
4
(pi)/(4) \frac{\pi}{4} π 4
−
1
−
1
-1 -1 − 1
y
y
y y y
y
=
e
−
1
y
=
e
−
1
{:y=e^(-1):} \begin{aligned}
y &= e^{-1}
\end{aligned} y = e − 1 Conclusion:
The limit of
(
tan
x
)
tan
2
x
(
tan
x
)
tan
2
x
(tan x)^(tan 2x) (\tan x)^{\tan 2 x} ( tan x ) tan 2 x as
x
x
x x x approaches
π
4
π
4
(pi)/(4) \frac{\pi}{4} π 4 is
e
−
1
e
−
1
e^(-1) e^{-1} e − 1 .
(d) वक्र
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(2x+3)y=(x-1)^(2) (2 x+3) y=(x-1)^2 ( 2 x + 3 ) y = ( x − 1 ) 2 के सभी अनंतस्पर्शी निकालिए।
Find all the asymptotes of the curve
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(2x+3)y=(x-1)^(2) (2 x+3) y=(x-1)^2 ( 2 x + 3 ) y = ( x − 1 ) 2 .
Answer:
Step-by-Step Solution:
Start with the given equation of the curve:
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(2x+3)y=(x-1)^(2) (2 x+3) y=(x-1)^2 ( 2 x + 3 ) y = ( x − 1 ) 2 .
Rewrite the equation in standard form:
2
x
y
+
3
y
=
x
2
−
2
x
+
1
x
2
−
2
x
y
−
2
x
−
3
y
+
1
=
0
2
x
y
+
3
y
=
x
2
−
2
x
+
1
x
2
−
2
x
y
−
2
x
−
3
y
+
1
=
0
{:[2xy+3y=x^(2)-2x+1],[x^(2)-2xy-2x-3y+1=0]:} \begin{align*}
2xy + 3y &= x^2 – 2x + 1 \\
x^2 – 2xy – 2x – 3y + 1 &= 0
\end{align*} 2 x y + 3 y = x 2 − 2 x + 1 x 2 − 2 x y − 2 x − 3 y + 1 = 0 To find the asymptotes, begin by assuming
y
=
m
x
+
c
y
=
m
x
+
c
y=mx+c y = mx + c y = m x + c .
Substitute
y
=
m
x
+
c
y
=
m
x
+
c
y=mx+c y = mx + c y = m x + c into the equation:
x
2
−
2
x
(
m
x
+
c
)
−
2
x
−
3
(
m
x
+
c
)
+
1
=
0
x
2
−
2
x
2
m
−
2
c
x
−
2
x
−
3
m
x
−
3
c
+
1
=
0
x
2
−
2
x
(
m
x
+
c
)
−
2
x
−
3
(
m
x
+
c
)
+
1
=
0
x
2
−
2
x
2
m
−
2
c
x
−
2
x
−
3
m
x
−
3
c
+
1
=
0
{:[x^(2)-2x(mx+c)-2x-3(mx+c)+1=0],[x^(2)-2x^(2)m-2cx-2x-3mx-3c+1=0]:} \begin{align*}
x^2 – 2x(mx + c) – 2x – 3(mx + c) + 1 &= 0 \\
x^2 – 2x^2m – 2cx – 2x – 3mx – 3c + 1 &= 0
\end{align*} x 2 − 2 x ( m x + c ) − 2 x − 3 ( m x + c ) + 1 = 0 x 2 − 2 x 2 m − 2 c x − 2 x − 3 m x − 3 c + 1 = 0 Group the terms with
x
2
x
2
x^(2) x^2 x 2
x
x
x x x
(
1
−
2
m
)
x
2
−
(
2
c
+
2
+
3
m
)
x
−
3
c
+
1
=
0
(
1
−
2
m
)
x
2
−
(
2
c
+
2
+
3
m
)
x
−
3
c
+
1
=
0
(1-2m)x^(2)-(2c+2+3m)x-3c+1=0 (1 – 2m)x^2 – (2c + 2 + 3m)x – 3c + 1 = 0 ( 1 − 2 m ) x 2 − ( 2 c + 2 + 3 m ) x − 3 c + 1 = 0 To have asymptotes, the coefficient of
x
2
x
2
x^(2) x^2 x 2
1
−
2
m
=
0
⟹
m
=
1
2
2
c
+
2
+
3
m
=
0
⟹
2
c
+
2
+
3
(
1
2
)
=
0
2
c
+
2
+
3
2
=
0
2
c
+
7
2
=
0
2
c
=
−
7
2
c
=
−
7
4
1
−
2
m
=
0
⟹
m
=
1
2
2
c
+
2
+
3
m
=
0
⟹
2
c
+
2
+
3
1
2
=
0
2
c
+
2
+
3
2
=
0
2
c
+
7
2
=
0
2
c
=
−
7
2
c
=
−
7
4
{:[1-2m=0Longrightarrowm=(1)/(2)],[2c+2+3m=0Longrightarrow2c+2+3((1)/(2))=0],[2c+2+(3)/(2)=0],[2c+(7)/(2)=0],[2c=-(7)/(2)],[c=-(7)/(4)]:} \begin{align*}
1 – 2m &= 0 \implies m = \frac{1}{2} \\
2c + 2 + 3m &= 0 \implies 2c + 2 + 3\left(\frac{1}{2}\right) = 0 \\
2c + 2 + \frac{3}{2} &= 0 \\
2c + \frac{7}{2} &= 0 \\
2c &= -\frac{7}{2} \\
c &= -\frac{7}{4}
\end{align*} 1 − 2 m = 0 ⟹ m = 1 2 2 c + 2 + 3 m = 0 ⟹ 2 c + 2 + 3 ( 1 2 ) = 0 2 c + 2 + 3 2 = 0 2 c + 7 2 = 0 2 c = − 7 2 c = − 7 4 Thus, one asymptote is
y
=
x
2
−
7
4
y
=
x
2
−
7
4
y=(x)/(2)-(7)/(4) y = \frac{x}{2} – \frac{7}{4} y = x 2 − 7 4 .
To find the vertical asymptotes, set the denominator equal to zero:
2
x
+
3
=
0
⟹
x
=
−
3
2
2
x
+
3
=
0
⟹
x
=
−
3
2
2x+3=0Longrightarrowx=-(3)/(2) 2x + 3 = 0 \implies x = -\frac{3}{2} 2 x + 3 = 0 ⟹ x = − 3 2 Conclusion:
The curve
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(
2
x
+
3
)
y
=
(
x
−
1
)
2
(2x+3)y=(x-1)^(2) (2 x+3) y=(x-1)^2 ( 2 x + 3 ) y = ( x − 1 ) 2 has one slant asymptote given by
y
=
x
2
−
7
4
y
=
x
2
−
7
4
y=(x)/(2)-(7)/(4) y = \frac{x}{2} – \frac{7}{4} y = x 2 − 7 4 and one vertical asymptote at
x
=
−
3
2
x
=
−
3
2
x=-(3)/(2) x = -\frac{3}{2} x = − 3 2 .
(e) दीर्घवृत्तज
2
x
2
+
6
y
2
+
3
z
2
=
27
2
x
2
+
6
y
2
+
3
z
2
=
27
2x^(2)+6y^(2)+3z^(2)=27 2 x^2+6 y^2+3 z^2=27 2 x 2 + 6 y 2 + 3 z 2 = 27 के स्पर्श समतल का समीकरण निकालिए, जो रेखा
x
−
y
−
z
=
0
=
x
−
y
+
2
z
−
9
x
−
y
−
z
=
0
=
x
−
y
+
2
z
−
9
x-y-z=0=x-y+2z-9 x-y-z=0=x-y+2 z-9 x − y − z = 0 = x − y + 2 z − 9 से होकर गुजरता है।
Find the equations of the tangent plane to the ellipsoid
2
x
2
+
6
y
2
+
3
z
2
=
27
2
x
2
+
6
y
2
+
3
z
2
=
27
2x^(2)+6y^(2)+3z^(2)=27 2 x^2+6 y^2+3 z^2=27 2 x 2 + 6 y 2 + 3 z 2 = 27 which passes through the line
x
−
y
−
z
=
0
=
x
−
y
+
2
z
−
9
x
−
y
−
z
=
0
=
x
−
y
+
2
z
−
9
x-y-z=0=x-y+2z-9 x-y-z=0=x-y+2 z-9 x − y − z = 0 = x − y + 2 z − 9 .
Answer:
Work/Calculations:
Equation of the Given Line:
x
−
y
−
z
=
0
(1)
x
−
y
−
z
=
0
(1)
x-y-z=0quad(1) x – y – z = 0 \quad \text{(1)} x − y − z = 0 (1) Equation of a Plane Through the Given Line:
x
−
y
−
z
+
λ
(
x
−
y
+
2
z
−
9
)
=
0
x
−
y
−
z
+
λ
(
x
−
y
+
2
z
−
9
)
=
0
x-y-z+lambda(x-y+2z-9)=0 x – y – z + \lambda(x – y + 2z – 9) = 0 x − y − z + λ ( x − y + 2 z − 9 ) = 0 Simplifying:
x
(
1
+
λ
)
+
y
(
−
1
−
λ
)
+
z
(
−
1
+
2
λ
)
=
9
λ
(2)
x
(
1
+
λ
)
+
y
(
−
1
−
λ
)
+
z
(
−
1
+
2
λ
)
=
9
λ
(2)
x(1+lambda)+y(-1-lambda)+z(-1+2lambda)=9lambdaquad(2) x(1 + \lambda) + y(-1 – \lambda) + z(-1 + 2\lambda) = 9\lambda \quad \text{(2)} x ( 1 + λ ) + y ( − 1 − λ ) + z ( − 1 + 2 λ ) = 9 λ (2) Ellipsoid Equation:
The equation of the given ellipsoid is
2
x
2
+
6
y
2
+
3
z
2
=
27
2
x
2
+
6
y
2
+
3
z
2
=
27
2x^(2)+6y^(2)+3z^(2)=27 2x^2 + 6y^2 + 3z^2 = 27 2 x 2 + 6 y 2 + 3 z 2 = 27 . We can normalize this equation as:
2
27
x
2
+
2
9
y
2
+
1
9
z
2
=
1
2
27
x
2
+
2
9
y
2
+
1
9
z
2
=
1
(2)/(27)x^(2)+(2)/(9)y^(2)+(1)/(9)z^(2)=1 \frac{2}{27}x^2 + \frac{2}{9}y^2 + \frac{1}{9}z^2 = 1 2 27 x 2 + 2 9 y 2 + 1 9 z 2 = 1 Here,
a
=
2
27
a
=
2
27
a=(2)/(27) a = \frac{2}{27} a = 2 27 ,
b
=
2
9
b
=
2
9
b=(2)/(9) b = \frac{2}{9} b = 2 9 , and
c
=
1
9
c
=
1
9
c=(1)/(9) c = \frac{1}{9} c = 1 9 .
Using the Tangent Plane Equation:
l
2
a
+
m
2
b
+
n
2
c
=
p
2
(3)
l
2
a
+
m
2
b
+
n
2
c
=
p
2
(3)
(l^(2))/(a)+(m^(2))/(b)+(n^(2))/(c)=p^(2)quad(3) \frac{l^2}{a} + \frac{m^2}{b} + \frac{n^2}{c} = p^2 \quad \text{(3)} l 2 a + m 2 b + n 2 c = p 2 (3) Here,
(
l
,
m
,
n
)
(
l
,
m
,
n
)
(l,m,n) (l, m, n) ( l , m , n ) is the normal vector to the plane, and
p
p
p p p is the distance from the origin.
Substituting into (3):
Now, we substitute the values
a
a
a a a ,
b
b
b b b , and
c
c
c c c into equation (3):
27
2
(
1
+
λ
)
2
+
9
2
(
−
1
−
λ
)
2
+
18
(
2
λ
−
1
)
2
=
(
9
λ
)
2
27
2
(
1
+
λ
)
2
+
9
2
(
−
1
−
λ
)
2
+
18
(
2
λ
−
1
)
2
=
(
9
λ
)
2
(27)/(2)(1+lambda)^(2)+(9)/(2)(-1-lambda)^(2)+18(2lambda-1)^(2)=(9lambda)^(2) \frac{27}{2}(1 + \lambda)^2 + \frac{9}{2}(-1 – \lambda)^2 + 18(2\lambda – 1)^2 = (9\lambda)^2 27 2 ( 1 + λ ) 2 + 9 2 ( − 1 − λ ) 2 + 18 ( 2 λ − 1 ) 2 = ( 9 λ ) 2 Solving for λ:
−
54
λ
2
+
54
=
0
−
54
λ
2
+
54
=
0
-54lambda^(2)+54=0 -54\lambda^2 + 54 = 0 − 54 λ 2 + 54 = 0
λ
2
=
1
λ
2
=
1
lambda^(2)=1 \lambda^2 = 1 λ 2 = 1 This gives two solutions:
λ
=
±
1
λ
=
±
1
lambda=+-1 \lambda = \pm 1 λ = ± 1 .
Conclusion:
Now, we can find the required equations of the tangent planes:
If
λ
=
1
λ
=
1
lambda=1 \lambda = 1 λ = 1 :
Substituting
λ
=
1
λ
=
1
lambda=1 \lambda = 1 λ = 1 into equation (2):
2
x
−
2
y
+
z
=
9
2
x
−
2
y
+
z
=
9
2x-2y+z=9 2x – 2y + z = 9 2 x − 2 y + z = 9 So, the equation of one of the tangent planes is
2
x
−
2
y
+
z
=
9
2
x
−
2
y
+
z
=
9
2x-2y+z=9 2x – 2y + z = 9 2 x − 2 y + z = 9 .
If
λ
=
−
1
λ
=
−
1
lambda=-1 \lambda = -1 λ = − 1 :
Substituting
λ
=
−
1
λ
=
−
1
lambda=-1 \lambda = -1 λ = − 1 into equation (2):
So, the equation of the other tangent plane is
z
=
3
z
=
3
z=3 z = 3 z = 3 .
These are the equations of the tangent planes to the ellipsoid that pass through the given line.
(a)
∫
0
1
tan
−
1
(
1
−
1
x
)
d
x
∫
0
1
tan
−
1
1
−
1
x
d
x
int_(0)^(1)tan^(-1)(1-(1)/(x))dx \int_0^1 \tan ^{-1}\left(1-\frac{1}{x}\right) d x ∫ 0 1 tan − 1 ( 1 − 1 x ) d x Evaluate
∫
0
1
tan
−
1
(
1
−
1
x
)
d
x
∫
0
1
tan
−
1
1
−
1
x
d
x
int_(0)^(1)tan^(-1)(1-(1)/(x))dx \int_0^1 \tan ^{-1}\left(1-\frac{1}{x}\right) d x ∫ 0 1 tan − 1 ( 1 − 1 x ) d x Answer:
Introduction:
We are tasked with evaluating the integral
∫
0
1
tan
−
1
(
1
−
1
x
)
d
x
∫
0
1
tan
−
1
1
−
1
x
d
x
int_(0)^(1)tan^(-1)(1-(1)/(x))dx \int_0^1 \tan^{-1}\left(1-\frac{1}{x}\right)dx ∫ 0 1 tan − 1 ( 1 − 1 x ) d x .
Work/Calculations:
Initial Setup:
We start by defining
I
I
I I I as the integral:
I
=
∫
0
1
tan
−
1
(
1
−
1
x
)
d
x
I
=
∫
0
1
tan
−
1
1
−
1
x
d
x
I=int_(0)^(1)tan^(-1)(1-(1)/(x))dx I = \int_0^1 \tan^{-1}\left(1-\frac{1}{x}\right)dx I = ∫ 0 1 tan − 1 ( 1 − 1 x ) d x Rewriting the Integral:
We can express
tan
−
1
(
1
−
1
x
)
tan
−
1
1
−
1
x
tan^(-1)(1-(1)/(x)) \tan^{-1}\left(1-\frac{1}{x}\right) tan − 1 ( 1 − 1 x ) as
tan
−
1
(
x
−
1
x
)
tan
−
1
x
−
1
x
tan^(-1)((x-1)/(x)) \tan^{-1}\left(\frac{x-1}{x}\right) tan − 1 ( x − 1 x ) :
I
=
∫
0
1
tan
−
1
(
x
−
1
x
)
d
x
(1)
I
=
∫
0
1
tan
−
1
x
−
1
x
d
x
(1)
I=int_(0)^(1)tan^(-1)((x-1)/(x))dx quad(1) I = \int_0^1 \tan^{-1}\left(\frac{x-1}{x}\right)dx \quad \text{(1)} I = ∫ 0 1 tan − 1 ( x − 1 x ) d x (1) Applying Integral Property:
Utilizing the property
∫
a
b
f
′
(
x
)
d
x
=
∫
a
b
f
(
a
+
b
−
x
)
d
x
∫
a
b
f
′
(
x
)
d
x
=
∫
a
b
f
(
a
+
b
−
x
)
d
x
int_(a)^(b)f^(‘)(x)dx=int_(a)^(b)f(a+b-x)dx \int_a^b f'(x)dx = \int_a^b f(a+b-x)dx ∫ a b f ′ ( x ) d x = ∫ a b f ( a + b − x ) d x , we obtain:
I
=
∫
0
1
tan
−
1
(
−
x
1
−
x
)
d
x
I
=
∫
0
1
tan
−
1
−
x
1
−
x
d
x
I=int_(0)^(1)tan^(-1)(-(x)/(1-x))dx I = \int_0^1 \tan^{-1}\left(-\frac{x}{1-x}\right)dx I = ∫ 0 1 tan − 1 ( − x 1 − x ) d x Further Simplification:
I
=
∫
0
1
tan
−
1
(
x
x
−
1
)
d
x
(2)
I
=
∫
0
1
tan
−
1
x
x
−
1
d
x
(2)
I=int_(0)^(1)tan^(-1)((x)/(x-1))dx quad(2) I = \int_0^1 \tan^{-1}\left(\frac{x}{x-1}\right)dx \quad \text{(2)} I = ∫ 0 1 tan − 1 ( x x − 1 ) d x (2) Combining Equations (1) and (2):
2
I
=
∫
0
1
tan
−
1
(
x
−
1
x
)
d
x
+
∫
0
1
tan
−
1
(
x
x
−
1
)
d
x
2
I
=
∫
0
1
tan
−
1
x
−
1
x
d
x
+
∫
0
1
tan
−
1
x
x
−
1
d
x
2I=int_(0)^(1)tan^(-1)((x-1)/(x))dx+int_(0)^(1)tan^(-1)((x)/(x-1))dx 2I = \int_0^1 \tan^{-1}\left(\frac{x-1}{x}\right)dx + \int_0^1 \tan^{-1}\left(\frac{x}{x-1}\right)dx 2 I = ∫ 0 1 tan − 1 ( x − 1 x ) d x + ∫ 0 1 tan − 1 ( x x − 1 ) d x Simplifying the Combined Integral:
Notice that
tan
−
1
x
+
tan
−
1
1
x
tan
−
1
x
+
tan
−
1
1
x
tan^(-1)x+tan^(-1)((1)/(x)) \tan^{-1}x + \tan^{-1}\frac{1}{x} tan − 1 x + tan − 1 1 x has a specific property:
tan
−
1
x
+
tan
−
1
1
x
=
{
π
2
if
x
>
0
−
π
2
if
x
<
0
tan
−
1
x
+
tan
−
1
1
x
=
π
2
if
x
>
0
−
π
2
if
x
<
0
tan^(-1)x+tan^(-1)((1)/(x))={[(pi)/(2),”if “x > 0],[-(pi)/(2),”if “x < 0]:} \tan^{-1}x + \tan^{-1}\frac{1}{x} = \begin{cases}
\frac{\pi}{2} & \text{if } x > 0 \\
-\frac{\pi}{2} & \text{if } x < 0
\end{cases} tan − 1 x + tan − 1 1 x = { π 2 if x > 0 − π 2 if x < 0 Since
x
∈
(
0
,
1
)
x
∈
(
0
,
1
)
x in(0,1) x \in (0,1) x ∈ ( 0 , 1 ) , we have
x
−
1
<
0
x
−
1
<
0
x-1 < 0 x – 1 < 0 x − 1 < 0 and
x
x
−
1
<
0
x
x
−
1
<
0
(x)/(x-1) < 0 \frac{x}{x-1} < 0 x x − 1 < 0 . Therefore, combining the integrals (3) results in:
2
I
=
∫
0
1
−
π
2
d
x
2
I
=
∫
0
1
−
π
2
d
x
2I=int_(0)^(1)-(pi)/(2)dx 2I = \int_0^1 -\frac{\pi}{2}dx 2 I = ∫ 0 1 − π 2 d x Evaluating the Integral:
2
I
=
−
π
2
(
x
)
|
0
1
=
−
π
2
(
1
−
0
)
=
−
π
2
2
I
=
−
π
2
(
x
)
|
0
1
=
−
π
2
(
1
−
0
)
=
−
π
2
2I=-(pi)/(2)(x)|_(0)^(1)=-(pi)/(2)(1-0)=-(pi)/(2) 2I = -\frac{\pi}{2}(x)\Bigg|_0^1 = -\frac{\pi}{2}(1 – 0) = -\frac{\pi}{2} 2 I = − π 2 ( x ) | 0 1 = − π 2 ( 1 − 0 ) = − π 2 Solving for
I
I
I I I
Finally, solving for
I
I
I I I :
I
=
−
π
4
I
=
−
π
4
I=-(pi)/(4) I = -\frac{\pi}{4} I = − π 4 Conclusion:
The corrected value of the given integral
∫
0
1
tan
−
1
(
1
−
1
x
)
d
x
∫
0
1
tan
−
1
1
−
1
x
d
x
int_(0)^(1)tan^(-1)(1-(1)/(x))dx \int_0^1 \tan^{-1}\left(1-\frac{1}{x}\right)dx ∫ 0 1 tan − 1 ( 1 − 1 x ) d x is
−
π
4
−
π
4
-(pi)/(4) -\frac{\pi}{4} − π 4 .
(b) एक
n
×
n
n
×
n
n xx n n \times n n × n आव्यूह
A
A
A A A को परिभाषित कीजिए, जबकि
A
=
I
−
2
u
⋅
u
T
A
=
I
−
2
u
⋅
u
T
A=I-2u*u^(T) A=I-2 u \cdot u^T A = I − 2 u ⋅ u T , जहाँ
u
u
u u u एक इकाई स्तंभ सदिश है।
(i) परीक्षण कीजिए कि
A
A
A A A सममित है।
(ii) परीक्षण कीजिए कि
A
A
A A A लांबिक है।
(iii) दिखाइए कि आव्यूह
A
A
A A A का अनुरेख
(
n
−
2
)
(
n
−
2
)
(n-2) (n-2) ( n − 2 ) है।
(iv) आव्यूह
A
3
×
3
A
3
×
3
A_(3xx3) A_{3 \times 3} A 3 × 3 निकालिए, जबकि
u
=
[
1
3
2
3
2
3
]
u
=
1
3
2
3
2
3
u=[[(1)/(3)],[(2)/(3)],[(2)/(3)]] u=\left[\begin{array}{c}\frac{1}{3} \\ \frac{2}{3} \\ \frac{2}{3}\end{array}\right] u = [ 1 3 2 3 2 3 ] है।
Define an
n
×
n
n
×
n
n xx n n \times n n × n matrix as
A
=
I
−
2
u
⋅
u
T
A
=
I
−
2
u
⋅
u
T
A=I-2u*u^(T) A=I-2 u \cdot u^T A = I − 2 u ⋅ u T , where
u
u
u u u is a unit column vector.
(i) Examine if
A
A
A A A is symmetric.
(ii) Examine if
A
A
A A A is orthogonal.
(iii) Show that trace
(
A
)
=
n
−
2
(
A
)
=
n
−
2
(A)=n-2 (A)=n-2 ( A ) = n − 2 .
(iv) Find
A
3
×
3
A
3
×
3
A_(3xx3) A_{3 \times 3} A 3 × 3 , when
u
=
[
1
3
2
3
2
3
]
u
=
1
3
2
3
2
3
u=[[(1)/(3)],[(2)/(3)],[(2)/(3)]] u=\left[\begin{array}{c}\frac{1}{3} \\ \frac{2}{3} \\ \frac{2}{3}\end{array}\right] u = [ 1 3 2 3 2 3 ] .
Answer:
Introduction We are given an
n
×
n
n
×
n
n xx n n \times n n × n matrix
A
A
A A A defined as
A
=
I
−
2
u
⋅
u
T
A
=
I
−
2
u
⋅
u
T
A=I-2u*u^(T) A = I – 2u \cdot u^T A = I − 2 u ⋅ u T , where
u
u
u u u is a unit column vector. We are tasked with examining the following properties of
A
A
A A A :
Whether
A
A
A A A Whether
A
A
A A A Examine the trace of
A
A
A A A Find
A
3
×
3
A
3
×
3
A_(3xx3) A_{3 \times 3} A 3 × 3
u
=
[
1
3
2
3
2
3
]
u
=
1
3
2
3
2
3
u=[[(1)/(3)],[(2)/(3)],[(2)/(3)]] u = \left[\begin{array}{c}\frac{1}{3} \\ \frac{2}{3} \\ \frac{2}{3}\end{array}\right] u = [ 1 3 2 3 2 3 ] Work/Calculations (i) Examine if
A
A
A A A A matrix
A
A
A A A is symmetric if
A
=
A
T
A
=
A
T
A=A^(T) A = A^T A = A T .
The transpose of
A
A
A A A is given by
(
I
−
2
u
⋅
u
T
)
T
(
I
−
2
u
⋅
u
T
)
T
(I-2u*u^(T))^(T) (I – 2u \cdot u^T)^T ( I − 2 u ⋅ u T ) T .
After calculating, we get
A
T
=
I
T
−
(
2
u
⋅
u
T
)
T
A
T
=
I
T
−
(
2
u
⋅
u
T
)
T
A^(T)=I^(T)-(2u*u^(T))^(T) A^T = I^T – (2u \cdot u^T)^T A T = I T − ( 2 u ⋅ u T ) T .
Since
I
T
=
I
I
T
=
I
I^(T)=I I^T = I I T = I and
(
2
u
⋅
u
T
)
T
=
2
u
⋅
u
T
(
2
u
⋅
u
T
)
T
=
2
u
⋅
u
T
(2u*u^(T))^(T)=2u*u^(T) (2u \cdot u^T)^T = 2u \cdot u^T ( 2 u ⋅ u T ) T = 2 u ⋅ u T , we find that
A
T
=
I
−
2
u
⋅
u
T
A
T
=
I
−
2
u
⋅
u
T
A^(T)=I-2u*u^(T) A^T = I – 2u \cdot u^T A T = I − 2 u ⋅ u T .
Therefore,
A
=
A
T
A
=
A
T
A=A^(T) A = A^T A = A T , which means
A
A
A A A is symmetric.
(ii) Examine if
A
A
A A A A matrix
A
A
A A A is orthogonal if
A
T
A
=
A
A
T
=
I
A
T
A
=
A
A
T
=
I
A^(T)A=AA^(T)=I A^T A = AA^T = I A T A = A A T = I .
Let’s substitute the values into the formula:
(
I
−
2
u
⋅
u
T
)
T
(
I
−
2
u
⋅
u
T
)
(
I
−
2
u
⋅
u
T
)
T
(
I
−
2
u
⋅
u
T
)
(I-2u*u^(T))^(T)(I-2u*u^(T)) (I – 2u \cdot u^T)^T (I – 2u \cdot u^T) ( I − 2 u ⋅ u T ) T ( I − 2 u ⋅ u T ) .
After calculating, we get
I
−
2
u
⋅
u
T
−
2
u
⋅
u
T
+
4
u
⋅
u
T
⋅
u
⋅
u
T
I
−
2
u
⋅
u
T
−
2
u
⋅
u
T
+
4
u
⋅
u
T
⋅
u
⋅
u
T
I-2u*u^(T)-2u*u^(T)+4u*u^(T)*u*u^(T) I – 2u \cdot u^T – 2u \cdot u^T + 4u \cdot u^T \cdot u \cdot u^T I − 2 u ⋅ u T − 2 u ⋅ u T + 4 u ⋅ u T ⋅ u ⋅ u T .
Since
u
u
u u u is a unit vector,
u
⋅
u
T
=
1
u
⋅
u
T
=
1
u*u^(T)=1 u \cdot u^T = 1 u ⋅ u T = 1 .
Therefore,
A
T
A
=
I
A
T
A
=
I
A^(T)A=I A^T A = I A T A = I and
A
A
T
=
I
A
A
T
=
I
AA^(T)=I AA^T = I A A T = I , which means
A
A
A A A is orthogonal.
(iii) Show that Trace
(
A
)
=
n
−
2
(
A
)
=
n
−
2
(A)=n-2 (A) = n – 2 ( A ) = n − 2 The trace of
A
A
A A A is the sum of its diagonal elements.
Trace
(
A
)
=
Trace
(
I
)
−
2
Trace
(
u
⋅
u
T
)
(
A
)
=
Trace
(
I
)
−
2
Trace
(
u
⋅
u
T
)
(A)=”Trace”(I)-2″Trace”(u*u^(T)) (A) = \text{Trace}(I) – 2 \text{Trace}(u \cdot u^T) ( A ) = Trace ( I ) − 2 Trace ( u ⋅ u T ) .
Since
u
u
u u u is a unit vector,
Trace
(
u
⋅
u
T
)
=
1
Trace
(
u
⋅
u
T
)
=
1
“Trace”(u*u^(T))=1 \text{Trace}(u \cdot u^T) = 1 Trace ( u ⋅ u T ) = 1 .
Therefore, Trace
(
A
)
=
n
−
2
(
A
)
=
n
−
2
(A)=n-2 (A) = n – 2 ( A ) = n − 2 .
(iv) Find
A
3
×
3
A
3
×
3
A_(3xx3) A_{3 \times 3} A 3 × 3
u
=
[
1
3
2
3
2
3
]
u
=
1
3
2
3
2
3
u=[[(1)/(3)],[(2)/(3)],[(2)/(3)]] u = \left[\begin{array}{c}\frac{1}{3} \\ \frac{2}{3} \\ \frac{2}{3}\end{array}\right] u = [ 1 3 2 3 2 3 ]
A
=
I
−
2
u
⋅
u
T
A
=
I
−
2
u
⋅
u
T
A=I-2u*u^(T) A = I – 2u \cdot u^T A = I − 2 u ⋅ u T After calculating, we get
A
=
(
1
−
2
9
−
4
9
−
4
9
−
4
9
1
−
8
9
−
8
9
−
4
9
−
8
9
1
−
8
9
)
A
=
1
−
2
9
−
4
9
−
4
9
−
4
9
1
−
8
9
−
8
9
−
4
9
−
8
9
1
−
8
9
A=([1-(2)/(9),-(4)/(9),-(4)/(9)],[-(4)/(9),1-(8)/(9),-(8)/(9)],[-(4)/(9),-(8)/(9),1-(8)/(9)]) A = \begin{pmatrix} 1 – \frac{2}{9} & -\frac{4}{9} & -\frac{4}{9} \\ -\frac{4}{9} & 1 – \frac{8}{9} & -\frac{8}{9} \\ -\frac{4}{9} & -\frac{8}{9} & 1 – \frac{8}{9} \end{pmatrix} A = ( 1 − 2 9 − 4 9 − 4 9 − 4 9 1 − 8 9 − 8 9 − 4 9 − 8 9 1 − 8 9 ) .
Simplifying,
A
=
(
7
9
−
4
9
−
4
9
−
4
9
1
9
−
8
9
−
4
9
−
8
9
1
9
)
A
=
7
9
−
4
9
−
4
9
−
4
9
1
9
−
8
9
−
4
9
−
8
9
1
9
A=([(7)/(9),-(4)/(9),-(4)/(9)],[-(4)/(9),(1)/(9),-(8)/(9)],[-(4)/(9),-(8)/(9),(1)/(9)]) A = \begin{pmatrix} \frac{7}{9} & -\frac{4}{9} & -\frac{4}{9} \\ -\frac{4}{9} & \frac{1}{9} & -\frac{8}{9} \\ -\frac{4}{9} & -\frac{8}{9} & \frac{1}{9} \end{pmatrix} A = ( 7 9 − 4 9 − 4 9 − 4 9 1 9 − 8 9 − 4 9 − 8 9 1 9 ) .
Conclusion The matrix
A
A
A A A The matrix
A
A
A A A The trace of
A
A
A A A
n
−
2
n
−
2
n-2 n – 2 n − 2 When
u
=
[
1
3
2
3
2
3
]
u
=
1
3
2
3
2
3
u=[[(1)/(3)],[(2)/(3)],[(2)/(3)]] u = \left[\begin{array}{c}\frac{1}{3} \\ \frac{2}{3} \\ \frac{2}{3}\end{array}\right] u = [ 1 3 2 3 2 3 ]
A
3
×
3
=
(
7
9
−
4
9
−
4
9
−
4
9
1
9
−
8
9
−
4
9
−
8
9
1
9
)
A
3
×
3
=
7
9
−
4
9
−
4
9
−
4
9
1
9
−
8
9
−
4
9
−
8
9
1
9
A_(3xx3)=([(7)/(9),-(4)/(9),-(4)/(9)],[-(4)/(9),(1)/(9),-(8)/(9)],[-(4)/(9),-(8)/(9),(1)/(9)]) A_{3 \times 3} = \begin{pmatrix} \frac{7}{9} & -\frac{4}{9} & -\frac{4}{9} \\ -\frac{4}{9} & \frac{1}{9} & -\frac{8}{9} \\ -\frac{4}{9} & -\frac{8}{9} & \frac{1}{9} \end{pmatrix} A 3 × 3 = ( 7 9 − 4 9 − 4 9 − 4 9 1 9 − 8 9 − 4 9 − 8 9 1 9 ) (c) एक ऐसे बेलन का समीकरण निकालिए, जिसकी जनक-रेखाएँ, रेखा
x
1
=
y
−
2
=
z
3
x
1
=
y
−
2
=
z
3
(x)/(1)=(y)/(-2)=(z)/(3) \frac{x}{1}=\frac{y}{-2}=\frac{z}{3} x 1 = y − 2 = z 3 के समांतर हैं तथा जिसका मार्गदर्शक वक्र
x
2
+
y
2
=
4
,
z
=
2
x
2
+
y
2
=
4
,
z
=
2
x^(2)+y^(2)=4,z=2 x^2+y^2=4, z=2 x 2 + y 2 = 4 , z = 2 है।
Find the equation of the cylinder whose generators are parallel to the line
x
1
=
y
−
2
=
z
3
x
1
=
y
−
2
=
z
3
(x)/(1)=(y)/(-2)=(z)/(3) \frac{x}{1}=\frac{y}{-2}=\frac{z}{3} x 1 = y − 2 = z 3 and whose guiding curve is
x
2
+
y
2
=
4
,
z
=
2
x
2
+
y
2
=
4
,
z
=
2
x^(2)+y^(2)=4,z=2 x^2+y^2=4, z=2 x 2 + y 2 = 4 , z = 2 .
Answer:
Equation of a Generator:
Let
P
(
x
1
,
y
1
,
z
1
)
P
(
x
1
,
y
1
,
z
1
)
P(x_(1),y_(1),z_(1)) P(x_1, y_1, z_1) P ( x 1 , y 1 , z 1 ) be any point on the cylinder. The equation of a generator passing through
P
P
P P P can be expressed as:
x
−
x
1
1
=
y
−
y
1
−
2
=
z
−
z
1
3
x
−
x
1
1
=
y
−
y
1
−
2
=
z
−
z
1
3
(x-x_(1))/(1)=(y-y_(1))/(-2)=(z-z_(1))/(3) \frac{x – x_1}{1} = \frac{y – y_1}{-2} = \frac{z – z_1}{3} x − x 1 1 = y − y 1 − 2 = z − z 1 3 Intersection with Plane
z
=
2
z
=
2
z=2 z=2 z = 2
The generator intersects the plane
z
=
2
z
=
2
z=2 z=2 z = 2 at a point given by:
x
−
x
1
=
y
−
y
1
−
2
=
z
−
z
1
3
(1)
⇒
(
x
1
+
2
−
z
1
3
,
−
2
(
2
−
z
1
)
3
+
y
1
,
2
)
x
−
x
1
=
y
−
y
1
−
2
=
z
−
z
1
3
(1)
⇒
x
1
+
2
−
z
1
3
,
−
2
(
2
−
z
1
)
3
+
y
1
,
2
{:[x-x_(1)=(y-y_(1))/(-2)=(z-z_(1))/(3)quad(1)],[=>(x_(1)+(2-z_(1))/(3),-(2(2-z_(1)))/(3)+y_(1),2)]:} \begin{aligned}
x – x_1 &= \frac{y – y_1}{-2} = \frac{z – z_1}{3} \quad \text{(1)} \\
\Rightarrow \left(x_1 + \frac{2 – z_1}{3}, -\frac{2(2 – z_1)}{3} + y_1, 2\right)
\end{aligned} x − x 1 = y − y 1 − 2 = z − z 1 3 (1) ⇒ ( x 1 + 2 − z 1 3 , − 2 ( 2 − z 1 ) 3 + y 1 , 2 ) Intersection with Guiding Curve:
The generator also intersects the guiding curve, given by
x
2
+
y
2
=
4
x
2
+
y
2
=
4
x^(2)+y^(2)=4 x^2 + y^2 = 4 x 2 + y 2 = 4 and
z
=
2
z
=
2
z=2 z = 2 z = 2 . Substituting
z
=
2
z
=
2
z=2 z = 2 z = 2 into equation (1), we get:
(
x
1
+
2
−
z
1
3
)
2
+
(
y
1
−
2
(
2
−
z
1
)
3
)
2
=
4
⇒
(
3
x
1
+
2
−
z
1
)
2
+
(
3
y
1
−
4
+
2
z
1
)
2
=
36
⇒
9
x
1
2
+
9
y
1
2
+
5
z
1
2
−
6
x
1
z
1
+
12
y
1
z
1
−
20
z
1
+
12
x
1
−
24
y
1
−
16
=
0
x
1
+
2
−
z
1
3
2
+
y
1
−
2
(
2
−
z
1
)
3
2
=
4
⇒
3
x
1
+
2
−
z
1
2
+
3
y
1
−
4
+
2
z
1
2
=
36
⇒
9
x
1
2
+
9
y
1
2
+
5
z
1
2
−
6
x
1
z
1
+
12
y
1
z
1
−
20
z
1
+
12
x
1
−
24
y
1
−
16
=
0
{:[(x_(1)+(2-z_(1))/(3))^(2)+(y_(1)-(2(2-z_(1)))/(3))^(2)=4],[=>(3x_(1)+2-z_(1))^(2)+(3y_(1)-4+2z_(1))^(2)=36],[=>9x_(1)^(2)+9y_(1)^(2)+5z_(1)^(2)-6x_(1)z_(1)+12y_(1)z_(1)-20z_(1)+12x_(1)-24y_(1)-16=0]:} \begin{aligned}
\left(x_1 + \frac{2 – z_1}{3}\right)^2 + \left(y_1 – \frac{2(2 – z_1)}{3}\right)^2 &= 4 \\
\Rightarrow \left(3x_1 + 2 – z_1\right)^2 + \left(3y_1 – 4 + 2z_1\right)^2 &= 36 \\
\Rightarrow 9x_1^2 + 9y_1^2 + 5z_1^2 – 6x_1z_1 + 12y_1z_1 – 20z_1 + 12x_1 – 24y_1 – 16 &= 0
\end{aligned} ( x 1 + 2 − z 1 3 ) 2 + ( y 1 − 2 ( 2 − z 1 ) 3 ) 2 = 4 ⇒ ( 3 x 1 + 2 − z 1 ) 2 + ( 3 y 1 − 4 + 2 z 1 ) 2 = 36 ⇒ 9 x 1 2 + 9 y 1 2 + 5 z 1 2 − 6 x 1 z 1 + 12 y 1 z 1 − 20 z 1 + 12 x 1 − 24 y 1 − 16 = 0 Equation of the Cylinder:
9
x
2
+
9
y
2
+
5
z
2
−
6
x
z
+
12
y
z
−
20
z
+
12
x
−
24
y
−
16
=
0
9
x
2
+
9
y
2
+
5
z
2
−
6
x
z
+
12
y
z
−
20
z
+
12
x
−
24
y
−
16
=
0
9x^(2)+9y^(2)+5z^(2)-6xz+12 yz-20 z+12 x-24 y-16=0 9x^2 + 9y^2 + 5z^2 – 6xz + 12yz – 20z + 12x – 24y – 16 = 0 9 x 2 + 9 y 2 + 5 z 2 − 6 x z + 12 y z − 20 z + 12 x − 24 y − 16 = 0 Conclusion:
The equation
9
x
2
+
9
y
2
+
5
z
2
−
6
x
z
+
12
y
z
−
20
z
+
12
x
−
24
y
−
16
=
0
9
x
2
+
9
y
2
+
5
z
2
−
6
x
z
+
12
y
z
−
20
z
+
12
x
−
24
y
−
16
=
0
9x^(2)+9y^(2)+5z^(2)-6xz+12 yz-20 z+12 x-24 y-16=0 9x^2 + 9y^2 + 5z^2 – 6xz + 12yz – 20z + 12x – 24y – 16 = 0 9 x 2 + 9 y 2 + 5 z 2 − 6 x z + 12 y z − 20 z + 12 x − 24 y − 16 = 0 represents the cylinder with generators parallel to the line
x
1
=
y
−
2
=
z
3
x
1
=
y
−
2
=
z
3
(x)/(1)=(y)/(-2)=(z)/(3) \frac{x}{1}=\frac{y}{-2}=\frac{z}{3} x 1 = y − 2 = z 3 and a guiding curve defined by
x
2
+
y
2
=
4
x
2
+
y
2
=
4
x^(2)+y^(2)=4 x^2+y^2=4 x 2 + y 2 = 4 and
z
=
2
z
=
2
z=2 z=2 z = 2 .
3(a) निम्न फलन पर विचार कीजिए :
f
(
x
)
=
∫
0
x
(
t
2
−
5
t
+
4
)
(
t
2
−
5
t
+
6
)
d
t
f
(
x
)
=
∫
0
x
t
2
−
5
t
+
4
t
2
−
5
t
+
6
d
t
f(x)=int_(0)^(x)(t^(2)-5t+4)(t^(2)-5t+6)dt f(x)=\int_0^x\left(t^2-5 t+4\right)\left(t^2-5 t+6\right) d t f ( x ) = ∫ 0 x ( t 2 − 5 t + 4 ) ( t 2 − 5 t + 6 ) d t (i) फलन
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) के क्रांतिक बिंदु निकालिए।
(ii) वे बिंदु निकालिए, जहाँ
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) का स्थानीय न्यूनतम होगा।
(iii) वे बिंदु निकालिए, जहाँ
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) का स्थानीय अधिकतम होगा।
(iv) फलन
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) के
[
0
,
5
]
[
0
,
5
]
[0,5] [0,5] [ 0 , 5 ] में कितने शून्यक होंगे, निकालिए।
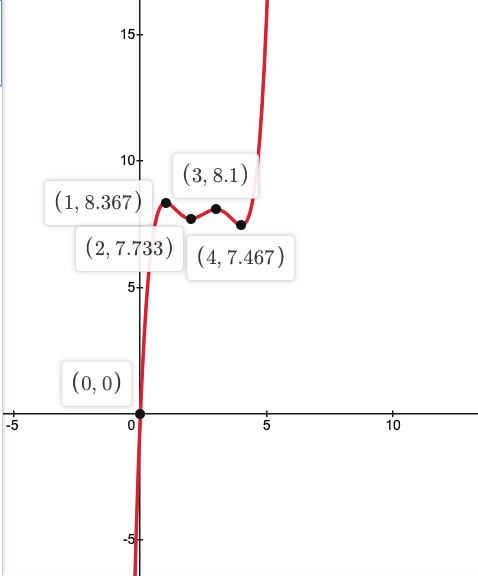
Consider the function
f
(
x
)
=
∫
0
x
(
t
2
−
5
t
+
4
)
(
t
2
−
5
t
+
6
)
d
t
f
(
x
)
=
∫
0
x
t
2
−
5
t
+
4
t
2
−
5
t
+
6
d
t
f(x)=int_(0)^(x)(t^(2)-5t+4)(t^(2)-5t+6)dt f(x)=\int_0^x\left(t^2-5 t+4\right)\left(t^2-5 t+6\right) d t f ( x ) = ∫ 0 x ( t 2 − 5 t + 4 ) ( t 2 − 5 t + 6 ) d t .
(i) Find the critical points of the function
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) .
(ii) Find the points at which local minimum occurs.
(iii) Find the points at which local maximum occurs.
(iv) Find the number of zeros of the function
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) in
[
0
,
5
]
[
0
,
5
]
[0,5] [0,5] [ 0 , 5 ] .
Answer:
Introduction We are given the function
f
(
x
)
=
∫
0
x
(
t
2
−
5
t
+
4
)
(
t
2
−
5
t
+
6
)
d
t
f
(
x
)
=
∫
0
x
t
2
−
5
t
+
4
t
2
−
5
t
+
6
d
t
f(x)=int_(0)^(x)(t^(2)-5t+4)(t^(2)-5t+6)dt f(x) = \int_0^x \left( t^2 – 5t + 4 \right) \left( t^2 – 5t + 6 \right) \, dt f ( x ) = ∫ 0 x ( t 2 − 5 t + 4 ) ( t 2 − 5 t + 6 ) d t . We are tasked with:
Finding the critical points of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) Identifying the points at which a local minimum occurs. Identifying the points at which a local maximum occurs. Determining the number of zeros of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x )
[
0
,
5
]
[
0
,
5
]
[0,5] [0, 5] [ 0 , 5 ] Work/Calculations (i) Find the Critical Points of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) By Leibnitz’s theorem, the derivative of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) is given by:
f
′
(
x
)
=
(
x
2
−
5
x
+
4
)
(
x
2
−
5
x
+
6
)
f
′
(
x
)
=
x
2
−
5
x
+
4
x
2
−
5
x
+
6
f^(‘)(x)=(x^(2)-5x+4)(x^(2)-5x+6) f'(x) = \left( x^2 – 5x + 4 \right) \left( x^2 – 5x + 6 \right) f ′ ( x ) = ( x 2 − 5 x + 4 ) ( x 2 − 5 x + 6 ) To find the critical points, we set
f
′
(
x
)
=
0
f
′
(
x
)
=
0
f^(‘)(x)=0 f'(x) = 0 f ′ ( x ) = 0 :
f
′
(
x
)
=
(
x
+
1
)
(
x
−
4
)
(
x
−
2
)
(
x
−
3
)
f
′
(
x
)
=
(
x
+
1
)
(
x
−
4
)
(
x
−
2
)
(
x
−
3
)
f^(‘)(x)=(x+1)(x-4)(x-2)(x-3) f'(x) = (x + 1)(x – 4)(x – 2)(x – 3) f ′ ( x ) = ( x + 1 ) ( x − 4 ) ( x − 2 ) ( x − 3 ) This gives us critical points at
x
=
1
,
2
,
3
,
4
x
=
1
,
2
,
3
,
4
x=1,2,3,4 x = 1, 2, 3, 4 x = 1 , 2 , 3 , 4 .
(ii) Find the Points at Which Local Minimum Occurs To find the local minima, we need to examine
f
″
(
x
)
f
″
(
x
)
f^(″)(x) f”(x) f ″ ( x ) :
f
″
(
x
)
=
(
2
x
−
5
)
[
x
2
−
5
x
+
6
]
+
[
x
2
−
5
x
+
4
]
(
2
x
−
5
)
f
″
(
x
)
=
(
2
x
−
5
)
x
2
−
5
x
+
6
+
x
2
−
5
x
+
4
(
2
x
−
5
)
f^(″)(x)=(2x-5)[x^(2)-5x+6]+[x^(2)-5x+4](2x-5) f”(x) = (2x – 5) \left[ x^2 – 5x + 6 \right] + \left[ x^2 – 5x + 4 \right] (2x – 5) f ″ ( x ) = ( 2 x − 5 ) [ x 2 − 5 x + 6 ] + [ x 2 − 5 x + 4 ] ( 2 x − 5 ) After simplifying, we get:
f
″
(
x
)
=
(
2
x
−
5
)
[
x
2
−
10
x
+
10
]
f
″
(
x
)
=
(
2
x
−
5
)
x
2
−
10
x
+
10
f^(″)(x)=(2x-5)[x^(2)-10 x+10] f”(x) = (2x – 5) \left[ x^2 – 10x + 10 \right] f ″ ( x ) = ( 2 x − 5 ) [ x 2 − 10 x + 10 ] At
x
=
2
x
=
2
x=2 x = 2 x = 2 ,
f
″
(
x
)
=
(
4
−
5
)
(
4
−
20
+
10
)
=
6
f
″
(
x
)
=
(
4
−
5
)
(
4
−
20
+
10
)
=
6
f^(″)(x)=(4-5)(4-20+10)=6 f”(x) = (4 – 5)(4 – 20 + 10) = 6 f ″ ( x ) = ( 4 − 5 ) ( 4 − 20 + 10 ) = 6 , which means
x
=
2
x
=
2
x=2 x = 2 x = 2 is a local minimum.
(iii) Find the Points at Which Local Maximum Occurs Using the same
f
″
(
x
)
f
″
(
x
)
f^(″)(x) f”(x) f ″ ( x ) as above, we find:
At
x
=
1
x
=
1
x=1 x = 1 x = 1 ,
f
″
(
x
)
=
(
2
−
5
)
(
1
−
10
+
10
)
=
−
3
f
″
(
x
)
=
(
2
−
5
)
(
1
−
10
+
10
)
=
−
3
f^(″)(x)=(2-5)(1-10+10)=-3 f”(x) = (2 – 5)(1 – 10 + 10) = -3 f ″ ( x ) = ( 2 − 5 ) ( 1 − 10 + 10 ) = − 3 , indicating
x
=
1
x
=
1
x=1 x = 1 x = 1 is a local maximum.
At
x
=
3
x
=
3
x=3 x = 3 x = 3 ,
f
″
(
x
)
=
(
6
−
5
)
(
9
−
30
+
10
)
=
−
11
f
″
(
x
)
=
(
6
−
5
)
(
9
−
30
+
10
)
=
−
11
f^(″)(x)=(6-5)(9-30+10)=-11 f”(x) = (6 – 5)(9 – 30 + 10) = -11 f ″ ( x ) = ( 6 − 5 ) ( 9 − 30 + 10 ) = − 11 , indicating
x
=
3
x
=
3
x=3 x = 3 x = 3 is a local maximum.
At
x
=
4
x
=
4
x=4 x = 4 x = 4 ,
f
″
(
x
)
=
(
8
−
5
)
(
16
−
40
+
10
)
=
−
42
f
″
(
x
)
=
(
8
−
5
)
(
16
−
40
+
10
)
=
−
42
f^(″)(x)=(8-5)(16-40+10)=-42 f”(x) = (8 – 5)(16 – 40 + 10) = -42 f ″ ( x ) = ( 8 − 5 ) ( 16 − 40 + 10 ) = − 42 , indicating
x
=
4
x
=
4
x=4 x = 4 x = 4 is a local maximum.
(iv) Find the Number of Zeros of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x )
[
0
,
5
]
[
0
,
5
]
[0,5] [0, 5] [ 0 , 5 ] The function
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) is an integral of a polynomial, and its graph shows that
f
(
0
)
=
0
f
(
0
)
=
0
f(0)=0 f(0) = 0 f ( 0 ) = 0 . Therefore,
x
=
0
x
=
0
x=0 x = 0 x = 0 is the only zero of the function
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) in
[
0
,
5
]
[
0
,
5
]
[0,5] [0, 5] [ 0 , 5 ] .
f
(
x
)
=
[
x
5
5
−
10
x
4
4
+
35
x
3
3
−
50
x
2
2
+
24
x
]
f
(
x
)
=
x
5
5
−
10
x
4
4
+
35
x
3
3
−
50
x
2
2
+
24
x
{:f(x)=[(x^(5))/(5)-(10x^(4))/(4)+(35x^(3))/(3)-(50x^(2))/(2)+24 x]:} \begin{aligned}
& f(x) =\left[\frac{x^5}{5}-\frac{10 x^4}{4}+\frac{35 x^3}{3}-\frac{50 x^2}{2}+24 x\right]
\end{aligned} f ( x ) = [ x 5 5 − 10 x 4 4 + 35 x 3 3 − 50 x 2 2 + 24 x ]
f
(
1
)
=
8.36
(
max
)
f
(
2
)
=
7.73
(
min
)
f
(
3
)
=
8.1
(
max
)
f
(
4
)
=
7.46
(
min
)
f
(
0
)
=
0
f
(
1
)
=
8.36
(
max
)
f
(
2
)
=
7.73
(
min
)
f
(
3
)
=
8.1
(
max
)
f
(
4
)
=
7.46
(
min
)
f
(
0
)
=
0
{:[f(1)=8.36(max)],[f(2)=7.73(min)],[f(3)=8.1(max)],[f(4)=7.46(min)],[f(0)=0]:} \begin{aligned}
& f(1)=8.36(\max ) \\
& f(2)=7.73(\min ) \\
& f(3)=8.1(\max ) \\
& f(4)=7.46(\min ) \\
& f(0)=0
\end{aligned} f ( 1 ) = 8.36 ( max ) f ( 2 ) = 7.73 ( min ) f ( 3 ) = 8.1 ( max ) f ( 4 ) = 7.46 ( min ) f ( 0 ) = 0 Conclusion The critical points of
f
(
x
)
f
(
x
)
f(x) f(x) f ( x )
x
=
1
,
2
,
3
,
4
x
=
1
,
2
,
3
,
4
x=1,2,3,4 x = 1, 2, 3, 4 x = 1 , 2 , 3 , 4 A local minimum occurs at
x
=
2
x
=
2
x=2 x = 2 x = 2 Local maxima occur at
x
=
1
,
3
,
4
x
=
1
,
3
,
4
x=1,3,4 x = 1, 3, 4 x = 1 , 3 , 4 The function
f
(
x
)
f
(
x
)
f(x) f(x) f ( x )
[
0
,
5
]
[
0
,
5
]
[0,5] [0, 5] [ 0 , 5 ]
x
=
0
x
=
0
x=0 x = 0 x = 0 (b) माना
F
F
F F F सम्मिश्र संख्याओं का एक उपक्षेत्र है व
T
:
F
3
→
F
3
T
:
F
3
→
F
3
T:F^(3)rarrF^(3) T: F^3 \rightarrow F^3 T : F 3 → F 3 एक ऐसा फलन है, जो निम्न रूप से परिभाषित है :
T
(
x
1
,
x
2
,
x
3
)
=
(
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
)
T
x
1
,
x
2
,
x
3
=
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
T(x_(1),x_(2),x_(3))=(x_(1)+x_(2)+3x_(3),2x_(1)-x_(2),-3x_(1)+x_(2)-x_(3)) T\left(x_1, x_2, x_3\right)=\left(x_1+x_2+3 x_3, 2 x_1-x_2,-3 x_1+x_2-x_3\right) T ( x 1 , x 2 , x 3 ) = ( x 1 + x 2 + 3 x 3 , 2 x 1 − x 2 , − 3 x 1 + x 2 − x 3 )
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c पर क्या शर्तें हैं कि
(
a
,
b
,
c
)
,
T
(
a
,
b
,
c
)
,
T
(a,b,c),T (a, b, c), T ( a , b , c ) , T के शुन्य समष्टि में है?
T
T
T T T की शून्यता निकालिए।
Let
F
F
F F F be a subfield of complex numbers and
T
T
T T T a function from
F
3
→
F
3
F
3
→
F
3
F^(3)rarrF^(3) F^3 \rightarrow F^3 F 3 → F 3 defined by
T
(
x
1
,
x
2
,
x
3
)
=
(
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
)
T
x
1
,
x
2
,
x
3
=
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
T(x_(1),x_(2),x_(3))=(x_(1)+x_(2)+3x_(3),2x_(1)-x_(2),-3x_(1)+x_(2)-x_(3)) T\left(x_1, x_2, x_3\right)=\left(x_1+x_2+3 x_3, 2 x_1-x_2,-3 x_1+x_2-x_3\right) T ( x 1 , x 2 , x 3 ) = ( x 1 + x 2 + 3 x 3 , 2 x 1 − x 2 , − 3 x 1 + x 2 − x 3 ) . What are the conditions on
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c such that
(
a
,
b
,
c
)
(
a
,
b
,
c
)
(a,b,c) (a, b, c) ( a , b , c ) be in the null space of
T
T
T T T ? Find the nullity of
T
T
T T T .
Answer:
Introduction We are given a function
T
:
F
3
→
F
3
T
:
F
3
→
F
3
T:F^(3)rarrF^(3) T: F^3 \rightarrow F^3 T : F 3 → F 3 defined by
T
(
x
1
,
x
2
,
x
3
)
=
(
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
)
T
(
x
1
,
x
2
,
x
3
)
=
(
x
1
+
x
2
+
3
x
3
,
2
x
1
−
x
2
,
−
3
x
1
+
x
2
−
x
3
)
T(x_(1),x_(2),x_(3))=(x_(1)+x_(2)+3x_(3),2x_(1)-x_(2),-3x_(1)+x_(2)-x_(3)) T(x_1, x_2, x_3) = (x_1 + x_2 + 3x_3, 2x_1 – x_2, -3x_1 + x_2 – x_3) T ( x 1 , x 2 , x 3 ) = ( x 1 + x 2 + 3 x 3 , 2 x 1 − x 2 , − 3 x 1 + x 2 − x 3 ) . The field
F
F
F F F is a subfield of the complex numbers. We are tasked with finding the conditions on
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c such that
(
a
,
b
,
c
)
(
a
,
b
,
c
)
(a,b,c) (a, b, c) ( a , b , c ) is in the null space of
T
T
T T T , and to find the nullity of
T
T
T T T .
Work/Calculations Step 1: Define the Null Space The null space of
T
T
T T T , denoted
Null
(
T
)
Null
(
T
)
“Null”(T) \text{Null}(T) Null ( T ) , is the set of all vectors
v
v
v v v in
F
3
F
3
F^(3) F^3 F 3 such that
T
(
v
)
=
0
T
(
v
)
=
0
T(v)=0 T(v) = 0 T ( v ) = 0 .
Step 2: Find the Conditions for
(
a
,
b
,
c
)
(
a
,
b
,
c
)
(a,b,c) (a, b, c) ( a , b , c ) To find
(
a
,
b
,
c
)
(
a
,
b
,
c
)
(a,b,c) (a, b, c) ( a , b , c ) in the null space of
T
T
T T T , we set
T
(
a
,
b
,
c
)
=
(
0
,
0
,
0
)
T
(
a
,
b
,
c
)
=
(
0
,
0
,
0
)
T(a,b,c)=(0,0,0) T(a, b, c) = (0, 0, 0) T ( a , b , c ) = ( 0 , 0 , 0 ) :
T
(
a
,
b
,
c
)
=
(
a
+
b
+
3
c
,
2
a
−
b
,
−
3
a
+
b
−
c
)
=
(
0
,
0
,
0
)
T
(
a
,
b
,
c
)
=
(
a
+
b
+
3
c
,
2
a
−
b
,
−
3
a
+
b
−
c
)
=
(
0
,
0
,
0
)
T(a,b,c)=(a+b+3c,2a-b,-3a+b-c)=(0,0,0) T(a, b, c) = (a + b + 3c, 2a – b, -3a + b – c) = (0, 0, 0) T ( a , b , c ) = ( a + b + 3 c , 2 a − b , − 3 a + b − c ) = ( 0 , 0 , 0 ) This leads to the following system of equations:
a
+
b
+
3
c
=
0
a
+
b
+
3
c
=
0
a+b+3c=0 a + b + 3c = 0 a + b + 3 c = 0
2
a
−
b
=
0
2
a
−
b
=
0
2a-b=0 2a – b = 0 2 a − b = 0
−
3
a
+
b
−
c
=
0
−
3
a
+
b
−
c
=
0
-3a+b-c=0 -3a + b – c = 0 − 3 a + b − c = 0 We can represent the system of equations as an augmented matrix and reduce it to row-echelon form:
1
1
3
0
2
−
1
0
0
−
3
1
−
1
0
1
1
3
0
2
−
1
0
0
−
3
1
−
1
0
{:[1,1,3,0],[2,-1,0,0],[-3,1,-1,0]:} \begin{array}{ccc|c}
1 & 1 & 3 & 0 \\
2 & -1 & 0 & 0 \\
-3 & 1 & -1 & 0
\end{array} 1 1 3 0 2 − 1 0 0 − 3 1 − 1 0 After row reduction, we get:
1
1
3
0
0
−
3
−
6
0
0
0
0
0
1
1
3
0
0
−
3
−
6
0
0
0
0
0
{:[1,1,3,0],[0,-3,-6,0],[0,0,0,0]:} \begin{array}{ccc|c}
1 & 1 & 3 & 0 \\
0 & -3 & -6 & 0 \\
0 & 0 & 0 & 0
\end{array} 1 1 3 0 0 − 3 − 6 0 0 0 0 0 This leads to:
a
+
b
+
3
c
=
0
a
+
b
+
3
c
=
0
a+b+3c=0 a + b + 3c = 0 a + b + 3 c = 0
−
3
b
−
6
c
=
0
−
3
b
−
6
c
=
0
-3b-6c=0 -3b – 6c = 0 − 3 b − 6 c = 0
b
+
2
c
=
0
b
+
2
c
=
0
b+2c=0 b + 2c = 0 b + 2 c = 0 Step 4: Solve the System Solving these equations, we find:
b
=
−
2
c
b
=
−
2
c
b=-2c b = -2c b = − 2 c
a
=
−
c
a
=
−
c
a=-c a = -c a = − c Step 5: Find the Nullity of
T
T
T T T Null space is given by let
C
=
K
C
=
K
C=K C=K C = K
(
a
,
b
,
c
)
=
[
−
K
,
−
2
K
,
K
]
=
K
[
−
1
,
−
2
,
1
]
(
a
,
b
,
c
)
=
[
−
K
,
−
2
K
,
K
]
=
K
[
−
1
,
−
2
,
1
]
{:[(a”,”b”,”c)=[-K”,”-2K”,”K]],[=K[-1″,”-2″,”1]]:} \begin{aligned}
& (a, b, c)=[-K,-2 K, K] \\
& =K[-1,-2,1]
\end{aligned} ( a , b , c ) = [ − K , − 2 K , K ] = K [ − 1 , − 2 , 1 ] The null space is spanned by the vector
[
−
1
,
−
2
,
1
]
[
−
1
,
−
2
,
1
]
[-1,-2,1] [-1, -2, 1] [ − 1 , − 2 , 1 ] , which means the nullity of
T
T
T T T is 1.
Conclusion The conditions on
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c
(
a
,
b
,
c
)
(
a
,
b
,
c
)
(a,b,c) (a, b, c) ( a , b , c )
T
T
T T T
a
=
−
c
a
=
−
c
a=-c a = -c a = − c
b
=
−
2
c
b
=
−
2
c
b=-2c b = -2c b = − 2 c The nullity of
T
T
T T T (c) यदि सरल रेखा
x
1
=
y
2
=
z
3
x
1
=
y
2
=
z
3
(x)/(1)=(y)/(2)=(z)/(3) \frac{x}{1}=\frac{y}{2}=\frac{z}{3} x 1 = y 2 = z 3 शंकु
5
y
z
−
8
z
x
−
3
x
y
=
0
5
y
z
−
8
z
x
−
3
x
y
=
0
5yz-8zx-3xy=0 5 y z-8 z x-3 x y=0 5 y z − 8 z x − 3 x y = 0 के तीन परस्पर लांबिक जनकों के समुच्चय में से एक है, तब अन्य दो जनकों के समीकरण निकालिए।
If the straight line
x
1
=
y
2
=
z
3
x
1
=
y
2
=
z
3
(x)/(1)=(y)/(2)=(z)/(3) \frac{x}{1}=\frac{y}{2}=\frac{z}{3} x 1 = y 2 = z 3 represents one of a set of three mutually perpendicular generators of the cone
5
y
z
−
8
z
x
−
3
x
y
=
0
5
y
z
−
8
z
x
−
3
x
y
=
0
5yz-8zx-3xy=0 5 y z-8 z x-3 x y=0 5 y z − 8 z x − 3 x y = 0 , then find the equations of the other two generators.
Answer:
Introduction We are given a straight line
x
1
=
y
2
=
z
3
x
1
=
y
2
=
z
3
(x)/(1)=(y)/(2)=(z)/(3) \frac{x}{1} = \frac{y}{2} = \frac{z}{3} x 1 = y 2 = z 3 and a cone
5
y
z
−
8
z
x
−
3
x
y
=
0
5
y
z
−
8
z
x
−
3
x
y
=
0
5yz-8zx-3xy=0 5yz – 8zx – 3xy = 0 5 y z − 8 z x − 3 x y = 0 . The straight line is one of the three mutually perpendicular generators of the cone. Our task is to find the equations of the other two generators.
Work/Calculations Step 1: Equation of the Plane Since the given line is one of the three mutually perpendicular generators, it is normal to the plane through the vertex that cuts the cone in two perpendicular generators. Therefore, the equation of the plane is:
x
+
2
y
+
3
z
=
0
(Equation 1)
x
+
2
y
+
3
z
=
0
(Equation 1)
x+2y+3z=0quad(Equation 1) x + 2y + 3z = 0 \quad \text{(Equation 1)} x + 2 y + 3 z = 0 (Equation 1) Step 2: Equation of the Line of Intersection Let one of the lines of intersection between the plane and the cone be:
x
l
=
y
m
=
z
n
x
l
=
y
m
=
z
n
(x)/(l)=(y)/(m)=(z)/(n) \frac{x}{l} = \frac{y}{m} = \frac{z}{n} x l = y m = z n Then, we have:
l
+
2
m
+
3
n
=
0
l
+
2
m
+
3
n
=
0
l+2m+3n=0 l + 2m + 3n = 0 l + 2 m + 3 n = 0
5
m
n
−
8
n
l
−
3
l
m
=
0
(Equation 2)
5
m
n
−
8
n
l
−
3
l
m
=
0
(Equation 2)
5mn-8nl-3lm=0quad(Equation 2) 5mn – 8nl – 3lm = 0 \quad \text{(Equation 2)} 5 m n − 8 n l − 3 l m = 0 (Equation 2) Step 3: Eliminate
l
l
l l l To find
m
m
m m m and
n
n
n n n , we eliminate
l
l
l l l between the two equations. This gives us:
5
m
n
−
(
8
n
+
3
m
)
[
−
(
2
m
+
3
n
)
]
=
0
5
m
n
−
(
8
n
+
3
m
)
[
−
(
2
m
+
3
n
)
]
=
0
5mn-(8n+3m)[-(2m+3n)]=0 5mn – (8n + 3m)[-(2m + 3n)] = 0 5 m n − ( 8 n + 3 m ) [ − ( 2 m + 3 n ) ] = 0
⇒
24
n
2
+
30
m
n
+
6
m
2
=
0
⇒
24
n
2
+
30
m
n
+
6
m
2
=
0
=>24n^(2)+30 mn+6m^(2)=0 \Rightarrow 24n^2 + 30mn + 6m^2 = 0 ⇒ 24 n 2 + 30 m n + 6 m 2 = 0
⇒
m
2
+
5
m
n
+
4
n
2
=
0
⇒
m
2
+
5
m
n
+
4
n
2
=
0
=>m^(2)+5mn+4n^(2)=0 \Rightarrow m^2 + 5mn + 4n^2 = 0 ⇒ m 2 + 5 m n + 4 n 2 = 0
⇒
(
m
+
n
)
(
m
+
4
n
)
=
0
⇒
(
m
+
n
)
(
m
+
4
n
)
=
0
=>(m+n)(m+4n)=0 \Rightarrow (m + n)(m + 4n) = 0 ⇒ ( m + n ) ( m + 4 n ) = 0 Step 4: Solve for
m
m
m m m
n
n
n n n From the above equation, we have two cases:
m
=
−
n
m
=
−
n
m=-n m = -n m = − n
m
=
−
4
n
m
=
−
4
n
m=-4n m = -4n m = − 4 n For the first case
m
=
−
n
m
=
−
n
m=-n m = -n m = − n , from Equation 2, we get
l
+
n
=
0
⇒
l
=
−
n
l
+
n
=
0
⇒
l
=
−
n
l+n=0=>l=-n l + n = 0 \Rightarrow l = -n l + n = 0 ⇒ l = − n .
Step 5: Equations of the Other Two Generators Using the values of
l
,
m
,
n
l
,
m
,
n
l,m,n l, m, n l , m , n , we find the equations of the other two generators:
When
m
=
−
n
m
=
−
n
m=-n m = -n m = − n
x
1
=
y
1
=
z
−
1
x
1
=
y
1
=
z
−
1
(x)/(1)=(y)/(1)=(z)/(-1) \frac{x}{1} = \frac{y}{1} = \frac{z}{-1} x 1 = y 1 = z − 1 When
m
=
−
4
n
m
=
−
4
n
m=-4n m = -4n m = − 4 n
x
5
=
y
−
4
=
z
1
x
5
=
y
−
4
=
z
1
(x)/(5)=(y)/(-4)=(z)/(1) \frac{x}{5} = \frac{y}{-4} = \frac{z}{1} x 5 = y − 4 = z 1 Conclusion The equations of the other two mutually perpendicular generators of the cone are:
x
1
=
y
1
=
z
−
1
x
1
=
y
1
=
z
−
1
(x)/(1)=(y)/(1)=(z)/(-1) \frac{x}{1} = \frac{y}{1} = \frac{z}{-1} x 1 = y 1 = z − 1
x
5
=
y
−
4
=
z
1
x
5
=
y
−
4
=
z
1
(x)/(5)=(y)/(-4)=(z)/(1) \frac{x}{5} = \frac{y}{-4} = \frac{z}{1} x 5 = y − 4 = z 1 These generators are indeed perpendicular to each other and to the given generator, fulfilling the conditions of the problem.
4(a) माना
A
=
[
1
0
2
2
−
1
3
4
1
8
]
और
B
=
[
−
11
2
2
−
4
0
1
6
−
1
−
1
]
A
=
1
0
2
2
−
1
3
4
1
8
और
B
=
−
11
2
2
−
4
0
1
6
−
1
−
1
A=[[1,0,2],[2,-1,3],[4,1,8]]” और “B=[[-11,2,2],[-4,0,1],[6,-1,-1]] A=\left[\begin{array}{rrr}
1 & 0 & 2 \\
2 & -1 & 3 \\
4 & 1 & 8
\end{array}\right] \text { और } B=\left[\begin{array}{rrr}
-11 & 2 & 2 \\
-4 & 0 & 1 \\
6 & -1 & -1
\end{array}\right] औ र A = [ 1 0 2 2 − 1 3 4 1 8 ] और B = [ − 11 2 2 − 4 0 1 6 − 1 − 1 ] (i)
A
B
A
B
AB A B A B ज्ञात कीजिए।
(ii) सारणिक
(
A
)
(
A
)
(A) (A) ( A ) व सारणिक
(
B
)
(
B
)
(B) (B) ( B ) ज्ञात कीजिए।
(iii) निम्न रैखिक समीकरणों के निकाय का हल निकालिए :
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x+2z=3,quad2x-y+3z=3,quad4x+y+8z=14 x+2 z=3, \quad 2 x-y+3 z=3, \quad 4 x+y+8 z=14 x + 2 z = 3 , 2 x − y + 3 z = 3 , 4 x + y + 8 z = 14 Let
A
=
[
1
0
2
2
−
1
3
4
1
8
]
and
B
=
[
−
11
2
2
−
4
0
1
6
−
1
−
1
]
A
=
1
0
2
2
−
1
3
4
1
8
and
B
=
−
11
2
2
−
4
0
1
6
−
1
−
1
A=[[1,0,2],[2,-1,3],[4,1,8]]quad” and “B=[[-11,2,2],[-4,0,1],[6,-1,-1]] A=\left[\begin{array}{rrr}
1 & 0 & 2 \\
2 & -1 & 3 \\
4 & 1 & 8
\end{array}\right] \quad \text { and } B=\left[\begin{array}{rrr}
-11 & 2 & 2 \\
-4 & 0 & 1 \\
6 & -1 & -1
\end{array}\right] A = [ 1 0 2 2 − 1 3 4 1 8 ] and B = [ − 11 2 2 − 4 0 1 6 − 1 − 1 ] (i) Find
A
B
A
B
AB A B A B .
(ii) Find
det
(
A
)
det
(
A
)
det(A) \operatorname{det}(A) det ( A ) and
det
(
B
)
det
(
B
)
det(B) \operatorname{det}(B) det ( B ) .
(iii) Solve the following system of linear equations :
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x+2z=3,quad2x-y+3z=3,quad4x+y+8z=14 x+2 z=3, \quad 2 x-y+3 z=3, \quad 4 x+y+8 z=14 x + 2 z = 3 , 2 x − y + 3 z = 3 , 4 x + y + 8 z = 14 Answer:
Part (i): Find
A
B
A
B
AB AB A B To find the product
A
B
A
B
AB AB A B , we’ll use the formula for matrix multiplication:
(
A
B
)
i
j
=
∑
k
=
1
n
A
i
k
×
B
k
j
(
A
B
)
i
j
=
∑
k
=
1
n
A
i
k
×
B
k
j
(AB)_(ij)=sum_(k=1)^(n)A_(ik)xxB_(kj) (AB)_{ij} = \sum_{k=1}^{n} A_{ik} \times B_{kj} ( A B ) i j = ∑ k = 1 n A i k × B k j Let’s substitute the values:
A
B
=
[
1
0
2
2
−
1
3
4
1
8
]
×
[
−
11
2
2
−
4
0
1
6
−
1
−
1
]
A
B
=
1
0
2
2
−
1
3
4
1
8
×
−
11
2
2
−
4
0
1
6
−
1
−
1
AB=[[1,0,2],[2,-1,3],[4,1,8]]xx[[-11,2,2],[-4,0,1],[6,-1,-1]] AB = \left[\begin{array}{rrr}
1 & 0 & 2 \\
2 & -1 & 3 \\
4 & 1 & 8
\end{array}\right] \times \left[\begin{array}{rrr}
-11 & 2 & 2 \\
-4 & 0 & 1 \\
6 & -1 & -1
\end{array}\right] A B = [ 1 0 2 2 − 1 3 4 1 8 ] × [ − 11 2 2 − 4 0 1 6 − 1 − 1 ] After calculating, we get:
A
B
=
[
1
0
0
0
1
0
0
0
1
]
A
B
=
1
0
0
0
1
0
0
0
1
AB=[[1,0,0],[0,1,0],[0,0,1]] AB = \left[\begin{array}{rrr}
1 & 0 & 0 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{array}\right] A B = [ 1 0 0 0 1 0 0 0 1 ] Part (ii): Find
det
(
A
)
det
(
A
)
“det”(A) \text{det}(A) det ( A )
det
(
B
)
det
(
B
)
“det”(B) \text{det}(B) det ( B ) To find the determinant of
A
A
A A A and
B
B
B B B , we’ll use the formula for a 3×3 matrix:
det
(
A
)
=
a
(
e
i
−
f
h
)
−
b
(
d
i
−
f
g
)
+
c
(
d
h
−
e
g
)
det
(
A
)
=
a
(
e
i
−
f
h
)
−
b
(
d
i
−
f
g
)
+
c
(
d
h
−
e
g
)
“det”(A)=a(ei-fh)-b(di-fg)+c(dh-eg) \text{det}(A) = a(ei – fh) – b(di – fg) + c(dh – eg) det ( A ) = a ( e i − f h ) − b ( d i − f g ) + c ( d h − e g )
det
(
A
)
=
1
(
−
1
×
8
−
3
×
1
)
−
0
+
2
(
2
×
1
−
4
×
−
1
)
=
1
(
−
8
−
3
)
+
0
+
2
(
2
+
4
)
=
−
11
+
0
+
12
=
1
det
(
A
)
=
1
(
−
1
×
8
−
3
×
1
)
−
0
+
2
(
2
×
1
−
4
×
−
1
)
=
1
(
−
8
−
3
)
+
0
+
2
(
2
+
4
)
=
−
11
+
0
+
12
=
1
“det”(A)=1(-1xx8-3xx1)-0+2(2xx1-4xx-1)=1(-8-3)+0+2(2+4)=-11+0+12=1 \text{det}(A) = 1(-1 \times 8 – 3 \times 1) – 0 + 2(2 \times 1 – 4 \times -1) = 1(-8 – 3) + 0 + 2(2 + 4) = -11 + 0 + 12 = 1 det ( A ) = 1 ( − 1 × 8 − 3 × 1 ) − 0 + 2 ( 2 × 1 − 4 × − 1 ) = 1 ( − 8 − 3 ) + 0 + 2 ( 2 + 4 ) = − 11 + 0 + 12 = 1
|
B
|
=
−
11
×
(
0
×
(
−
1
)
−
1
×
(
−
1
)
)
−
2
×
(
−
4
×
(
−
1
)
−
1
×
6
)
+
2
×
(
−
4
×
(
−
1
)
−
0
×
6
)
|
B
|
=
−
11
×
(
0
+
1
)
−
2
×
(
4
−
6
)
+
2
×
(
4
+
0
)
|
B
|
=
−
11
×
(
1
)
−
2
×
(
−
2
)
+
2
×
(
4
)
|
B
|
=
−
11
+
4
+
8
|
B
|
=
1
|
B
|
=
−
11
×
(
0
×
(
−
1
)
−
1
×
(
−
1
)
)
−
2
×
(
−
4
×
(
−
1
)
−
1
×
6
)
+
2
×
(
−
4
×
(
−
1
)
−
0
×
6
)
|
B
|
=
−
11
×
(
0
+
1
)
−
2
×
(
4
−
6
)
+
2
×
(
4
+
0
)
|
B
|
=
−
11
×
(
1
)
−
2
×
(
−
2
)
+
2
×
(
4
)
|
B
|
=
−
11
+
4
+
8
|
B
|
=
1
{:[|B|=-11 xx(0xx(-1)-1xx(-1))-2xx(-4xx(-1)-1xx6)+2xx(-4xx(-1)-0xx6)],[|B|=-11 xx(0+1)-2xx(4-6)+2xx(4+0)],[|B|=-11 xx(1)-2xx(-2)+2xx(4)],[|B|=-11+4+8],[|B|=1]:} \begin{aligned} &|B| =-11 \times(0 \times(-1)-1 \times(-1))-2 \times(-4 \times(-1)-1 \times 6)+2 \times(-4 \times(-1)-0 \times 6) \\ & |B|=-11 \times(0+1)-2 \times(4-6)+2 \times(4+0) \\ & |B|=-11 \times(1)-2 \times(-2)+2 \times(4) \\ & |B|=-11+4+8 \\ & |B|=1\end{aligned} | B | = − 11 × ( 0 × ( − 1 ) − 1 × ( − 1 ) ) − 2 × ( − 4 × ( − 1 ) − 1 × 6 ) + 2 × ( − 4 × ( − 1 ) − 0 × 6 ) | B | = − 11 × ( 0 + 1 ) − 2 × ( 4 − 6 ) + 2 × ( 4 + 0 ) | B | = − 11 × ( 1 ) − 2 × ( − 2 ) + 2 × ( 4 ) | B | = − 11 + 4 + 8 | B | = 1 Part (iii): Solve the system of linear equations The system of equations is:
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x
+
2
z
=
3
,
2
x
−
y
+
3
z
=
3
,
4
x
+
y
+
8
z
=
14
x+2z=3,quad2x-y+3z=3,quad4x+y+8z=14 x+2z=3, \quad 2x-y+3z=3, \quad 4x+y+8z=14 x + 2 z = 3 , 2 x − y + 3 z = 3 , 4 x + y + 8 z = 14 We can write this system as
A
X
=
B
A
X
=
B
AX=B AX = B A X = B , where
A
A
A A A is the coefficient matrix,
X
X
X X X is the variable matrix, and
B
B
B B B is the constant matrix.
A
=
[
1
0
2
2
−
1
3
4
1
8
]
,
X
=
[
x
y
z
]
,
B
=
[
3
3
14
]
A
=
1
0
2
2
−
1
3
4
1
8
,
X
=
x
y
z
,
B
=
3
3
14
A=[[1,0,2],[2,-1,3],[4,1,8]],quad X=[[x],[y],[z]],quad B=[[3],[3],[14]] A = \left[\begin{array}{rrr}
1 & 0 & 2 \\
2 & -1 & 3 \\
4 & 1 & 8
\end{array}\right], \quad X = \left[\begin{array}{r}
x \\
y \\
z
\end{array}\right], \quad B = \left[\begin{array}{r}
3 \\
3 \\
14
\end{array}\right] A = [ 1 0 2 2 − 1 3 4 1 8 ] , X = [ x y z ] , B = [ 3 3 14 ] Converting given equations into matrix form
[
1
0
2
3
2
−
1
3
3
4
1
8
14
]
1
0
2
3
2
−
1
3
3
4
1
8
14
[[1,0,2,3],[2,-1,3,3],[4,1,8,14]] \left[\begin{array}{ccc|c}
1 & 0 & 2 & 3 \\
2 & -1 & 3 & 3 \\
4 & 1 & 8 & 14
\end{array}\right] [ 1 0 2 3 2 − 1 3 3 4 1 8 14 ]
R
2
←
R
2
−
2
×
R
1
=
[
1
0
2
3
0
−
1
−
1
−
3
4
1
8
14
]
R
2
←
R
2
−
2
×
R
1
=
1
0
2
3
0
−
1
−
1
−
3
4
1
8
14
{:[R_(2)larrR_(2)-2xxR_(1)],[=[[1,0,2,3],[0,-1,-1,-3],[4,1,8,14]]]:} \begin{aligned}
& R_2 \leftarrow R_2-2 \times R_1 \\
& =\left[\begin{array}{ccc|c}
1 & 0 & 2 & 3 \\
0 & -1 & -1 & -3 \\
4 & 1 & 8 & 14
\end{array}\right]
\end{aligned} R 2 ← R 2 − 2 × R 1 = [ 1 0 2 3 0 − 1 − 1 − 3 4 1 8 14 ]
R
3
←
R
3
−
4
×
R
1
=
[
1
0
2
3
0
−
1
−
1
−
3
0
1
0
2
]
R
3
←
R
3
−
4
×
R
1
=
1
0
2
3
0
−
1
−
1
−
3
0
1
0
2
{:[R_(3)larrR_(3)-4xxR_(1)],[=[[1,0,2,3],[0,-1,-1,-3],[0,1,0,2]]]:} \begin{aligned}
& R_3 \leftarrow R_3-4 \times R_1 \\
& =\left[\begin{array}{ccc|c}
1 & 0 & 2 & 3 \\
0 & -1 & -1 & -3 \\
0 & 1 & 0 & 2
\end{array}\right]
\end{aligned} R 3 ← R 3 − 4 × R 1 = [ 1 0 2 3 0 − 1 − 1 − 3 0 1 0 2 ]
R
3
←
R
3
+
R
2
=
[
1
0
2
3
0
−
1
−
1
−
3
0
0
−
1
−
1
]
R
3
←
R
3
+
R
2
=
1
0
2
3
0
−
1
−
1
−
3
0
0
−
1
−
1
{:[R_(3)larrR_(3)+R_(2)],[=[[1,0,2,3],[0,-1,-1,-3],[0,0,-1,-1]]]:} \begin{aligned}
& R_3 \leftarrow R_3+R_2 \\
& =\left[\begin{array}{rrr|c}
1 & 0 & 2 & 3 \\
0 & -1 & -1 & -3 \\
0 & 0 & -1 & -1
\end{array}\right]
\end{aligned} R 3 ← R 3 + R 2 = [ 1 0 2 3 0 − 1 − 1 − 3 0 0 − 1 − 1 ]
x
+
2
z
=
3
→
(
1
)
−
y
−
z
=
−
3
→
(
2
)
−
z
=
−
1
→
(
3
)
x
+
2
z
=
3
→
(
1
)
−
y
−
z
=
−
3
→
(
2
)
−
z
=
−
1
→
(
3
)
{:[x+2z=3rarr(1)],[-y-z=-3rarr(2)],[-z=-1rarr(3)]:} \begin{aligned}
& x+2 z=3 \rightarrow(1) \\
& -y-z=-3 \rightarrow(2) \\
& -z=-1 \rightarrow(3)
\end{aligned} x + 2 z = 3 → ( 1 ) − y − z = − 3 → ( 2 ) − z = − 1 → ( 3 ) Now use back substitution method From (3)
−
z
=
−
1
⇒
z
=
1
−
z
=
−
1
⇒
z
=
1
{:[-z=-1],[=>z=1]:} \begin{aligned}
& -z=-1 \\
& \Rightarrow z=1
\end{aligned} − z = − 1 ⇒ z = 1 From (2)
−
y
−
z
=
−
3
⇒
−
y
−
(
1
)
=
−
3
⇒
−
y
−
1
=
−
3
⇒
−
y
=
−
3
+
1
⇒
−
y
=
−
2
⇒
y
=
2
−
y
−
z
=
−
3
⇒
−
y
−
(
1
)
=
−
3
⇒
−
y
−
1
=
−
3
⇒
−
y
=
−
3
+
1
⇒
−
y
=
−
2
⇒
y
=
2
{:[-y-z=-3],[=>-y-(1)=-3],[=>-y-1=-3],[=>-y=-3+1],[=>-y=-2],[=>y=2]:} \begin{aligned}
& -y-z=-3 \\
& \Rightarrow-y-(1)=-3 \\
& \Rightarrow-y-1=-3 \\
& \Rightarrow-y=-3+1 \\
& \Rightarrow-y=-2 \\
& \Rightarrow y=2
\end{aligned} − y − z = − 3 ⇒ − y − ( 1 ) = − 3 ⇒ − y − 1 = − 3 ⇒ − y = − 3 + 1 ⇒ − y = − 2 ⇒ y = 2 From (1)
x
+
2
z
=
3
⇒
x
+
2
(
1
)
=
3
⇒
x
+
2
=
3
⇒
x
=
3
−
2
⇒
x
=
1
x
+
2
z
=
3
⇒
x
+
2
(
1
)
=
3
⇒
x
+
2
=
3
⇒
x
=
3
−
2
⇒
x
=
1
{:[x+2z=3],[=>x+2(1)=3],[=>x+2=3],[=>x=3-2],[=>x=1]:} \begin{aligned}
& x+2 z=3 \\
& \Rightarrow x+2(1)=3 \\
& \Rightarrow x+2=3 \\
& \Rightarrow x=3-2 \\
& \Rightarrow x=1
\end{aligned} x + 2 z = 3 ⇒ x + 2 ( 1 ) = 3 ⇒ x + 2 = 3 ⇒ x = 3 − 2 ⇒ x = 1 Solution using back substitution method.
x
=
1
,
y
=
2
and
z
=
1
x
=
1
,
y
=
2
and
z
=
1
x=1,y=2″ and “z=1 x=1, y=2 \text { and } z=1 x = 1 , y = 2 and z = 1 (b) अतिपरवलयिक परवलयज
x
2
a
2
−
y
2
b
2
=
2
z
x
2
a
2
−
y
2
b
2
=
2
z
(x^(2))/(a^(2))-(y^(2))/(b^(2))=2z \frac{x^2}{a^2}-\frac{y^2}{b^2}=2 z x 2 a 2 − y 2 b 2 = 2 z के लांबिक जनकों के प्रतिच्छेद बिंदु का बिंदुपथ निकालिए।
Find the locus of the point of intersection of the perpendicular generators of the hyperbolic paraboloid
x
2
a
2
−
y
2
b
2
=
2
z
x
2
a
2
−
y
2
b
2
=
2
z
(x^(2))/(a^(2))-(y^(2))/(b^(2))=2z \frac{x^2}{a^2}-\frac{y^2}{b^2}=2 z x 2 a 2 − y 2 b 2 = 2 z .
Answer:
To find the locus, we need to consider the enveloping cone of the given hyperbolic paraboloid with a vertex at the point
(
α
,
β
,
γ
)
(
α
,
β
,
γ
)
(alpha,beta,gamma) (\alpha, \beta, \gamma) ( α , β , γ ) .
The equation of the enveloping cone can be represented as
S
S
1
=
T
2
S
S
1
=
T
2
SS_(1)=T^(2) S S_1 = T^2 S S 1 = T 2 , where:
S
=
x
2
a
2
−
y
2
b
2
−
2
z
S
=
x
2
a
2
−
y
2
b
2
−
2
z
S=(x^(2))/(a^(2))-(y^(2))/(b^(2))-2z S = \frac{x^2}{a^2} – \frac{y^2}{b^2} – 2z S = x 2 a 2 − y 2 b 2 − 2 z
S
1
=
α
2
a
2
−
β
2
b
2
−
2
γ
S
1
=
α
2
a
2
−
β
2
b
2
−
2
γ
S_(1)=(alpha^(2))/(a^(2))-(beta^(2))/(b^(2))-2gamma S_1 = \frac{\alpha^2}{a^2} – \frac{\beta^2}{b^2} – 2\gamma S 1 = α 2 a 2 − β 2 b 2 − 2 γ
T
=
α
x
a
2
−
β
y
b
2
−
(
z
+
γ
)
T
=
α
x
a
2
−
β
y
b
2
−
(
z
+
γ
)
T=(alpha x)/(a^(2))-(beta y)/(b^(2))-(z+gamma) T = \frac{\alpha x}{a^2} – \frac{\beta y}{b^2} – (z + \gamma) T = α x a 2 − β y b 2 − ( z + γ ) Substituting these into
S
S
1
=
T
2
S
S
1
=
T
2
SS_(1)=T^(2) S S_1 = T^2 S S 1 = T 2 , we get:
(
x
2
a
2
−
y
2
b
2
−
2
z
)
(
α
2
a
2
−
β
2
b
2
−
2
γ
)
=
(
α
x
a
2
−
β
y
b
2
−
z
−
γ
)
2
x
2
a
2
−
y
2
b
2
−
2
z
α
2
a
2
−
β
2
b
2
−
2
γ
=
α
x
a
2
−
β
y
b
2
−
z
−
γ
2
((x^(2))/(a^(2))-(y^(2))/(b^(2))-2z)((alpha^(2))/(a^(2))-(beta^(2))/(b^(2))-2gamma)=((alpha x)/(a^(2))-(beta y)/(b^(2))-z-gamma)^(2) \left(\frac{x^2}{a^2} – \frac{y^2}{b^2} – 2z\right)\left(\frac{\alpha^2}{a^2} – \frac{\beta^2}{b^2} – 2\gamma\right) = \left(\frac{\alpha x}{a^2} – \frac{\beta y}{b^2} – z – \gamma\right)^2 ( x 2 a 2 − y 2 b 2 − 2 z ) ( α 2 a 2 − β 2 b 2 − 2 γ ) = ( α x a 2 − β y b 2 − z − γ ) 2 For the enveloping cone to have three mutually perpendicular generators, the sum of the coefficients of
x
2
,
y
2
,
x
2
,
y
2
,
x^(2),y^(2), x^2, y^2, x 2 , y 2 , and
z
2
z
2
z^(2) z^2 z 2 must be zero. That is:
[
1
a
2
(
α
2
a
2
−
β
2
b
2
−
2
γ
)
−
α
2
a
4
]
+
[
−
1
b
2
(
α
2
a
2
−
β
2
b
2
−
2
γ
)
−
β
2
b
4
]
+
[
−
1
]
=
0
1
a
2
α
2
a
2
−
β
2
b
2
−
2
γ
−
α
2
a
4
+
−
1
b
2
α
2
a
2
−
β
2
b
2
−
2
γ
−
β
2
b
4
+
[
−
1
]
=
0
[(1)/(a^(2))((alpha^(2))/(a^(2))-(beta^(2))/(b^(2))-2gamma)-(alpha^(2))/(a^(4))]+[-(1)/(b^(2))((alpha^(2))/(a^(2))-(beta^(2))/(b^(2))-2gamma)-(beta^(2))/(b^(4))]+[-1]=0 \left[\frac{1}{a^2}\left(\frac{\alpha^2}{a^2} – \frac{\beta^2}{b^2} – 2\gamma\right) – \frac{\alpha^2}{a^4}\right] + \left[-\frac{1}{b^2}\left(\frac{\alpha^2}{a^2} – \frac{\beta^2}{b^2} – 2\gamma\right) – \frac{\beta^2}{b^4}\right] + [-1] = 0 [ 1 a 2 ( α 2 a 2 − β 2 b 2 − 2 γ ) − α 2 a 4 ] + [ − 1 b 2 ( α 2 a 2 − β 2 b 2 − 2 γ ) − β 2 b 4 ] + [ − 1 ] = 0 Simplifying, we find:
α
2
+
β
2
−
2
γ
(
a
2
−
b
2
)
+
a
2
b
2
=
0
α
2
+
β
2
−
2
γ
(
a
2
−
b
2
)
+
a
2
b
2
=
0
alpha^(2)+beta^(2)-2gamma(a^(2)-b^(2))+a^(2)b^(2)=0 \alpha^2 + \beta^2 – 2\gamma(a^2 – b^2) + a^2b^2 = 0 α 2 + β 2 − 2 γ ( a 2 − b 2 ) + a 2 b 2 = 0 Conclusion The locus of the point
(
α
,
β
,
γ
)
(
α
,
β
,
γ
)
(alpha,beta,gamma) (\alpha, \beta, \gamma) ( α , β , γ ) where the perpendicular generators of the hyperbolic paraboloid intersect is given by:
x
2
+
y
2
−
2
(
a
2
−
b
2
)
z
+
a
2
b
2
=
0
x
2
+
y
2
−
2
(
a
2
−
b
2
)
z
+
a
2
b
2
=
0
x^(2)+y^(2)-2(a^(2)-b^(2))z+a^(2)b^(2)=0 x^2 + y^2 – 2(a^2 – b^2)z + a^2b^2 = 0 x 2 + y 2 − 2 ( a 2 − b 2 ) z + a 2 b 2 = 0 This equation satisfies all the conditions and constraints of the problem.
(c) लाग्रांज की अनिर्धारित गुणक विधि का प्रयोग करके फलन
u
=
x
2
+
y
2
+
z
2
u
=
x
2
+
y
2
+
z
2
u=x^(2)+y^(2)+z^(2) u=x^2+y^2+z^2 u = x 2 + y 2 + z 2 का चरम मान ज्ञात कीजिए, जो
2
x
+
3
y
+
5
z
=
30
2
x
+
3
y
+
5
z
=
30
2x+3y+5z=30 2 x+3 y+5 z=30 2 x + 3 y + 5 z = 30 शर्त द्वारा प्रतिबंधित है।
Find an extreme value of the function
u
=
x
2
+
y
2
+
z
2
u
=
x
2
+
y
2
+
z
2
u=x^(2)+y^(2)+z^(2) u=x^2+y^2+z^2 u = x 2 + y 2 + z 2 , subject to the condition
2
x
+
3
y
+
5
z
=
30
2
x
+
3
y
+
5
z
=
30
2x+3y+5z=30 2 x+3 y+5 z=30 2 x + 3 y + 5 z = 30 , by using Lagrange’s method of undetermined multiplier.
Answer:
We start by defining the Lagrangian function
F
F
F F F as follows:
F
=
x
2
+
y
2
+
z
2
+
λ
(
2
x
+
3
y
+
5
z
−
30
)
F
=
x
2
+
y
2
+
z
2
+
λ
(
2
x
+
3
y
+
5
z
−
30
)
F=x^(2)+y^(2)+z^(2)+lambda(2x+3y+5z-30) F = x^2 + y^2 + z^2 + \lambda (2x + 3y + 5z – 30) F = x 2 + y 2 + z 2 + λ ( 2 x + 3 y + 5 z − 30 ) To find the extreme values, we set
d
F
=
0
d
F
=
0
dF=0 dF = 0 d F = 0 . The differential
d
F
d
F
dF dF d F is given by:
d
F
=
(
2
x
+
2
λ
)
d
x
+
(
2
y
+
3
λ
)
d
y
+
(
2
z
+
5
λ
)
d
z
d
F
=
(
2
x
+
2
λ
)
d
x
+
(
2
y
+
3
λ
)
d
y
+
(
2
z
+
5
λ
)
d
z
dF=(2x+2lambda)dx+(2y+3lambda)dy+(2z+5lambda)dz dF = (2x + 2\lambda) dx + (2y + 3\lambda) dy + (2z + 5\lambda) dz d F = ( 2 x + 2 λ ) d x + ( 2 y + 3 λ ) d y + ( 2 z + 5 λ ) d z From this, we get the following equations:
2
x
+
2
λ
=
0
2
x
+
2
λ
=
0
2x+2lambda=0 2x + 2\lambda = 0 2 x + 2 λ = 0
2
y
+
3
λ
=
0
2
y
+
3
λ
=
0
2y+3lambda=0 2y + 3\lambda = 0 2 y + 3 λ = 0
2
z
+
5
λ
=
0
2
z
+
5
λ
=
0
2z+5lambda=0 2z + 5\lambda = 0 2 z + 5 λ = 0 Multiplying Equation 1 by
x
x
x x x , Equation 2 by
y
y
y y y , and Equation 3 by
z
z
z z z , and then adding them, we get:
2
(
x
2
+
y
2
+
z
2
)
+
λ
(
2
x
+
3
y
+
5
z
)
=
0
2
(
x
2
+
y
2
+
z
2
)
+
λ
(
2
x
+
3
y
+
5
z
)
=
0
2(x^(2)+y^(2)+z^(2))+lambda(2x+3y+5z)=0 2(x^2 + y^2 + z^2) + \lambda (2x + 3y + 5z) = 0 2 ( x 2 + y 2 + z 2 ) + λ ( 2 x + 3 y + 5 z ) = 0 Since
2
x
+
3
y
+
5
z
=
30
2
x
+
3
y
+
5
z
=
30
2x+3y+5z=30 2x + 3y + 5z = 30 2 x + 3 y + 5 z = 30 , we can rewrite the above equation as:
U
=
−
15
λ
(Equation 4)
U
=
−
15
λ
(Equation 4)
U=-15 lambdaquad(Equation 4) U = -15\lambda \quad \text{(Equation 4)} U = − 15 λ (Equation 4) Next, we solve for
x
,
y
,
x
,
y
,
x,y, x, y, x , y , and
z
z
z z z in terms of
λ
λ
lambda \lambda λ :
x
=
−
2
λ
2
,
y
=
−
3
λ
2
,
z
=
−
5
λ
2
x
=
−
2
λ
2
,
y
=
−
3
λ
2
,
z
=
−
5
λ
2
x=-(2lambda)/(2),quad y=-(3lambda)/(2),quad z=-(5lambda)/(2) x = -\frac{2\lambda}{2}, \quad y = -\frac{3\lambda}{2}, \quad z = -\frac{5\lambda}{2} x = − 2 λ 2 , y = − 3 λ 2 , z = − 5 λ 2 Substituting these into the constraint
2
x
+
3
y
+
5
z
=
30
2
x
+
3
y
+
5
z
=
30
2x+3y+5z=30 2x + 3y + 5z = 30 2 x + 3 y + 5 z = 30 , we get:
−
4
λ
−
9
λ
−
25
λ
=
60
−
4
λ
−
9
λ
−
25
λ
=
60
-4lambda-9lambda-25 lambda=60 -4\lambda – 9\lambda – 25\lambda = 60 − 4 λ − 9 λ − 25 λ = 60
−
38
λ
=
60
⇒
λ
=
−
30
19
−
38
λ
=
60
⇒
λ
=
−
30
19
-38 lambda=60quad=>quad lambda=-(30)/(19) -38\lambda = 60 \quad \Rightarrow \quad \lambda = -\frac{30}{19} − 38 λ = 60 ⇒ λ = − 30 19 Using Equation 4, we find the extreme value
U
U
U U U :
U
extreme
=
−
15
(
−
30
19
)
=
450
19
U
extreme
=
−
15
−
30
19
=
450
19
U_(“extreme”)=-15(-(30)/(19))=(450)/(19) U_{\text{extreme}} = -15\left(-\frac{30}{19}\right) = \frac{450}{19} U extreme = − 15 ( − 30 19 ) = 450 19 Finally, we check the second derivative
d
2
F
d
2
F
d^(2)F d^2F d 2 F :
d
2
F
=
2
(
d
x
2
+
d
y
2
+
d
z
2
)
>
0
d
2
F
=
2
(
d
x
2
+
d
y
2
+
d
z
2
)
>
0
d^(2)F=2(dx^(2)+dy^(2)+dz^(2)) > 0 d^2F = 2(dx^2 + dy^2 + dz^2) > 0 d 2 F = 2 ( d x 2 + d y 2 + d z 2 ) > 0 This confirms that the extreme value is a minimum.
Conclusion The minimum value of
U
U
U U U subject to the given constraint is
U
min
=
450
19
U
min
=
450
19
U_(min)=(450)/(19) U_{\min} = \frac{450}{19} U min = 450 19 .
खण्ड-B / SECTION-B
5(a) निम्न अवकल समीकरण को हल कीजिए :
x
cos
(
y
x
)
(
y
d
x
+
x
d
y
)
=
y
sin
(
y
x
)
(
x
d
y
−
y
d
x
)
x
cos
y
x
(
y
d
x
+
x
d
y
)
=
y
sin
y
x
(
x
d
y
−
y
d
x
)
x cos((y)/(x))(ydx+xdy)=y sin((y)/(x))(xdy-ydx) x \cos \left(\frac{y}{x}\right)(y d x+x d y)=y \sin \left(\frac{y}{x}\right)(x d y-y d x) x cos ( y x ) ( y d x + x d y ) = y sin ( y x ) ( x d y − y d x ) Solve the following differential equation :
x
cos
(
y
x
)
(
y
d
x
+
x
d
y
)
=
y
sin
(
y
x
)
(
x
d
y
−
y
d
x
)
x
cos
y
x
(
y
d
x
+
x
d
y
)
=
y
sin
y
x
(
x
d
y
−
y
d
x
)
x cos((y)/(x))(ydx+xdy)=y sin((y)/(x))(xdy-ydx) x \cos \left(\frac{y}{x}\right)(y d x+x d y)=y \sin \left(\frac{y}{x}\right)(x d y-y d x) x cos ( y x ) ( y d x + x d y ) = y sin ( y x ) ( x d y − y d x ) Answer:
We start with the given differential equation:
x
cos
(
y
x
)
(
y
d
x
+
x
d
y
)
=
y
sin
(
y
x
)
(
x
d
y
−
y
d
x
)
(Equation 1)
x
cos
y
x
(
y
d
x
+
x
d
y
)
=
y
sin
y
x
(
x
d
y
−
y
d
x
)
(Equation 1)
x cos((y)/(x))(ydx+xdy)=y sin((y)/(x))(xdy-ydx)quad(Equation 1) x \cos \left(\frac{y}{x}\right)(y dx + x dy) = y \sin \left(\frac{y}{x}\right)(x dy – y dx) \quad \text{(Equation 1)} x cos ( y x ) ( y d x + x d y ) = y sin ( y x ) ( x d y − y d x ) (Equation 1) Rewriting Equation 1, we get:
(
x
cos
y
x
+
y
sin
y
x
)
y
−
(
y
sin
y
x
−
x
cos
y
x
)
x
d
y
d
x
=
0
x
cos
y
x
+
y
sin
y
x
y
−
y
sin
y
x
−
x
cos
y
x
x
d
y
d
x
=
0
(x cos((y)/(x))+y sin((y)/(x)))y-(y sin((y)/(x))-x cos((y)/(x)))x(dy)/(dx)=0 \left(x \cos \frac{y}{x} + y \sin \frac{y}{x}\right) y – \left(y \sin \frac{y}{x} – x \cos \frac{y}{x}\right) x \frac{dy}{dx} = 0 ( x cos y x + y sin y x ) y − ( y sin y x − x cos y x ) x d y d x = 0 Simplifying, we find:
d
y
d
x
=
{
x
cos
y
x
+
y
sin
y
x
}
y
{
y
sin
y
x
−
x
cos
y
x
}
x
(Equation 2)
d
y
d
x
=
x
cos
y
x
+
y
sin
y
x
y
y
sin
y
x
−
x
cos
y
x
x
(Equation 2)
(dy)/(dx)=({x cos((y)/(x))+y sin((y)/(x))}y)/({y sin((y)/(x))-x cos((y)/(x))}x)quad(Equation 2) \frac{dy}{dx} = \frac{\left\{x \cos \frac{y}{x} + y \sin \frac{y}{x}\right\} y}{\left\{y \sin \frac{y}{x} – x \cos \frac{y}{x}\right\} x} \quad \text{(Equation 2)} d y d x = { x cos y x + y sin y x } y { y sin y x − x cos y x } x (Equation 2) Further simplification yields:
d
y
d
x
=
[
cos
y
x
+
y
x
sin
y
x
]
(
y
x
)
[
y
x
sin
y
x
−
cos
y
x
]
(Equation 3)
d
y
d
x
=
cos
y
x
+
y
x
sin
y
x
y
x
y
x
sin
y
x
−
cos
y
x
(Equation 3)
(dy)/(dx)=([cos((y)/(x))+(y)/(x)sin((y)/(x))]((y)/(x)))/([(y)/(x)sin((y)/(x))-cos((y)/(x))])quad(Equation 3) \frac{dy}{dx} = \frac{\left[\cos \frac{y}{x} + \frac{y}{x} \sin \frac{y}{x}\right]\left(\frac{y}{x}\right)}{\left[\frac{y}{x} \sin \frac{y}{x} – \cos \frac{y}{x}\right]} \quad \text{(Equation 3)} d y d x = [ cos y x + y x sin y x ] ( y x ) [ y x sin y x − cos y x ] (Equation 3) Let’s make a substitution:
y
x
=
v
⇒
y
=
v
x
y
x
=
v
⇒
y
=
v
x
(y)/(x)=v=>y=vx \frac{y}{x} = v \Rightarrow y = vx y x = v ⇒ y = v x . Differentiating, we get:
d
y
d
x
=
v
+
x
d
v
d
x
(Equation 4)
d
y
d
x
=
v
+
x
d
v
d
x
(Equation 4)
(dy)/(dx)=v+x(dv)/(dx)quad(Equation 4) \frac{dy}{dx} = v + x \frac{dv}{dx} \quad \text{(Equation 4)} d y d x = v + x d v d x (Equation 4) Using Equations 3 and 4, we find:
v
+
x
d
v
d
x
=
v
(
cos
v
+
v
sin
v
)
v
sin
v
−
cos
v
⇒
x
d
v
d
x
=
v
(
cos
v
+
v
sin
v
)
v
sin
v
−
cos
v
−
v
=
2
v
cos
v
v
sin
v
−
cos
v
v
+
x
d
v
d
x
=
v
(
cos
v
+
v
sin
v
)
v
sin
v
−
cos
v
⇒
x
d
v
d
x
=
v
(
cos
v
+
v
sin
v
)
v
sin
v
−
cos
v
−
v
=
2
v
cos
v
v
sin
v
−
cos
v
{:[v+x(dv)/(dx)=(v(cos v+v sin v))/(v sin v-cos v)],[=>x(dv)/(dx)=(v(cos v+v sin v))/(v sin v-cos v)-v=(2v cos v)/(v sin v-cos v)]:} \begin{aligned}
v+x \frac{\mathbf{d} v}{\mathbf{d} x} & =\frac{v(\cos v+v \sin v)}{v \sin v-\cos v} \\
\Rightarrow x \frac{\mathbf{d} v}{\mathbf{d} x} & =\frac{v(\cos v+v \sin v)}{v \sin v-\cos v}-v=\frac{2 v \cos v}{v \sin v-\cos v}
\end{aligned} v + x d v d x = v ( cos v + v sin v ) v sin v − cos v ⇒ x d v d x = v ( cos v + v sin v ) v sin v − cos v − v = 2 v cos v v sin v − cos v
x
d
v
d
x
=
2
v
cos
v
v
sin
v
−
cos
v
x
d
v
d
x
=
2
v
cos
v
v
sin
v
−
cos
v
x(dv)/(dx)=(2v cos v)/(v sin v-cos v) x \frac{dv}{dx} = \frac{2v \cos v}{v \sin v – \cos v} x d v d x = 2 v cos v v sin v − cos v
2
d
x
x
=
v
sin
v
−
cos
v
v
cos
v
d
v
=
[
sin
v
cos
v
−
1
v
]
d
v
2
d
x
x
=
v
sin
v
−
cos
v
v
cos
v
d
v
=
sin
v
cos
v
−
1
v
d
v
2(dx)/(x)=(v sin v-cos v)/(v cos v)dv=[(sin v)/(cos v)-(1)/(v)]dv 2 \frac{\mathbf{d} x}{x}=\frac{v \sin v-\cos v}{v \cos v} \mathbf{d} v=\left[\frac{\sin v}{\cos v}-\frac{1}{v}\right] \mathbf{d} v 2 d x x = v sin v − cos v v cos v d v = [ sin v cos v − 1 v ] d v Integrating both sides, we get:
2
log
x
=
−
log
cos
v
−
log
v
+
log
c
2
log
x
=
−
log
cos
v
−
log
v
+
log
c
2log x=-log cos v-log v+log c 2 \log x = -\log \cos v – \log v + \log c 2 log x = − log cos v − log v + log c
log
x
2
=
log
(
c
v
cos
v
)
log
x
2
=
log
c
v
cos
v
log x^(2)=log((c)/(v)cos v) \log x^2=\log \left(\frac{c}{v} \cos v\right) log x 2 = log ( c v cos v ) Simplifying, we find:
x
2
v
cos
v
=
c
x
2
v
cos
v
=
c
x^(2)v cos v=c x^2 v \cos v = c x 2 v cos v = c Finally, substituting back
v
=
y
x
v
=
y
x
v=(y)/(x) v = \frac{y}{x} v = y x , we get:
x
y
cos
y
x
=
c
x
y
cos
y
x
=
c
xy cos((y)/(x))=c xy \cos \frac{y}{x} = c x y cos y x = c Or equivalently,
x
y
=
c
sec
(
y
x
)
x
y
=
c
sec
y
x
xy=c sec((y)/(x)) xy = c \sec \left(\frac{y}{x}\right) x y = c sec ( y x ) Conclusion The solution to the given differential equation is
x
y
=
c
sec
(
y
x
)
x
y
=
c
sec
y
x
xy=c sec((y)/(x)) xy = c \sec \left(\frac{y}{x}\right) x y = c sec ( y x ) .
(b) वृत्त-कुल, जो बिंदु
(
0
,
2
)
(
0
,
2
)
(0,2) (0,2) ( 0 , 2 ) एवं
(
0
,
−
2
)
(
0
,
−
2
)
(0,-2) (0,-2) ( 0 , − 2 ) से गुजरता है, का लंबकोणीय संछेदी ज्ञात कीजिए।
Find the orthogonal trajectories of the family of circles passing through the points
(
0
,
2
)
(
0
,
2
)
(0,2) (0,2) ( 0 , 2 ) and
(
0
,
−
2
)
(
0
,
−
2
)
(0,-2) (0,-2) ( 0 , − 2 ) .
Answer:
We start with the general equation for a family of circles:
x
2
+
y
2
+
2
g
x
+
2
f
y
+
d
=
0
(Equation 1)
x
2
+
y
2
+
2
g
x
+
2
f
y
+
d
=
0
(Equation 1)
x^(2)+y^(2)+2gx+2fy+d=0quad(Equation 1) x^2+y^2+2gx+2fy+d=0 \quad \text{(Equation 1)} x 2 + y 2 + 2 g x + 2 f y + d = 0 (Equation 1) Given that the circle passes through
(
0
,
2
)
(
0
,
2
)
(0,2) (0,2) ( 0 , 2 ) and
(
0
,
−
2
)
(
0
,
−
2
)
(0,-2) (0,-2) ( 0 , − 2 ) , we can substitute these points into Equation 1 to get:
4
+
4
f
+
d
=
0
(Equation 2, from (0,2))
4
−
4
f
+
d
=
0
(Equation 3, from (0,-2))
4
+
4
f
+
d
=
0
(Equation 2, from (0,2))
4
−
4
f
+
d
=
0
(Equation 3, from (0,-2))
4+4f+d=0quad(Equation 2, from (0,2))4-4f+d=0quad(Equation 3, from (0,-2)) 4+4f+d=0 \quad \text{(Equation 2, from (0,2))} \\
4-4f+d=0 \quad \text{(Equation 3, from (0,-2))} 4 + 4 f + d = 0 (Equation 2, from (0,2)) 4 − 4 f + d = 0 (Equation 3, from (0,-2)) Solving Equations 2 and 3, we find
f
=
0
f
=
0
f=0 f=0 f = 0 and
d
=
−
4
d
=
−
4
d=-4 d=-4 d = − 4 . Substituting these into Equation 1, we get:
x
2
+
y
2
+
2
g
x
−
4
=
0
(Equation 4)
x
2
+
y
2
+
2
g
x
−
4
=
0
(Equation 4)
x^(2)+y^(2)+2gx-4=0quad(Equation 4) x^2+y^2+2gx-4=0 \quad \text{(Equation 4)} x 2 + y 2 + 2 g x − 4 = 0 (Equation 4) Differentiating Equation 4 with respect to
x
x
x x x , we get:
2
x
+
2
y
(
d
y
d
x
)
+
2
g
=
0
2
x
+
2
y
d
y
d
x
+
2
g
=
0
2x+2y((dy)/(dx))+2g=0 2x+2y\left(\frac{dy}{dx}\right)+2g=0 2 x + 2 y ( d y d x ) + 2 g = 0 Simplifying, we find:
g
=
−
[
x
+
y
(
d
y
d
x
)
]
(Equation 5)
g
=
−
x
+
y
d
y
d
x
(Equation 5)
g=-[x+y((dy)/(dx))]quad(Equation 5) g= -\left[x+y\left(\frac{dy}{dx}\right)\right] \quad \text{(Equation 5)} g = − [ x + y ( d y d x ) ] (Equation 5) Substituting the value of
g
g
g g g into Equation 4, we get:
x
2
+
y
2
−
2
x
[
x
+
y
(
d
y
d
x
)
]
−
4
=
0
(Equation 6)
x
2
+
y
2
−
2
x
x
+
y
d
y
d
x
−
4
=
0
(Equation 6)
x^(2)+y^(2)-2x[x+y((dy)/(dx))]-4=0quad(Equation 6) x^2+y^2-2x\left[x+y\left(\frac{dy}{dx}\right)\right]-4=0 \quad \text{(Equation 6)} x 2 + y 2 − 2 x [ x + y ( d y d x ) ] − 4 = 0 (Equation 6) Equation 6 is the differential equation for the family of circles.
For orthogonal trajectories, we replace
d
y
d
x
d
y
d
x
(dy)/(dx) \frac{dy}{dx} d y d x with
−
d
x
d
y
−
d
x
d
y
-(dx)/(dy) -\frac{dx}{dy} − d x d y . Doing so, we get:
Then we get
x
2
+
y
2
−
2
x
[
x
−
y
(
d
x
d
y
)
]
−
4
=
0
⇒
x
2
+
y
2
−
4
=
x
−
y
(
d
x
d
y
)
x
2
+
y
2
−
4
2
x
−
x
=
−
y
(
d
x
d
y
)
⇒
−
x
2
+
y
2
−
4
2
x
=
−
y
(
d
x
d
y
)
x
2
−
y
2
+
4
2
x
y
=
(
d
x
d
y
)
⇒
2
x
y
d
x
−
(
x
2
−
y
2
+
4
)
d
y
=
0
Then we get
x
2
+
y
2
−
2
x
x
−
y
d
x
d
y
−
4
=
0
⇒
x
2
+
y
2
−
4
=
x
−
y
d
x
d
y
x
2
+
y
2
−
4
2
x
−
x
=
−
y
d
x
d
y
⇒
−
x
2
+
y
2
−
4
2
x
=
−
y
d
x
d
y
x
2
−
y
2
+
4
2
x
y
=
d
x
d
y
⇒
2
x
y
d
x
−
x
2
−
y
2
+
4
d
y
=
0
{:[” Then we get “x^(2)+y^(2)-2x[x-y((dx)/(dy))]-4=0],[=>x^(2)+y^(2)-4=x-y((dx)/(dy))],[(x^(2)+y^(2)-4)/(2x)-x=-y((dx)/(dy))],[=>(-x^(2)+y^(2)-4)/(2x)=-y((dx)/(dy))],[(x^(2)-y^(2)+4)/(2xy)=((dx)/(dy))],[=>2xydx-(x^(2)-y^(2)+4)dy=0]:} \begin{aligned}
& \text { Then we get } x^2+y^2-2 x\left[x-y\left(\frac{\mathbf{d} x}{\mathbf{d} y}\right)\right]-4=0 \\
& \Rightarrow x^2+y^2-4=x-y\left(\frac{\mathbf{d} x}{\mathbf{d} y}\right) \\
& \frac{x^2+y^2-4}{2 x}-x=-y\left(\frac{\mathbf{d} x}{\mathbf{d} y}\right) \\
& \Rightarrow \frac{-x^2+y^2-4}{2 x}=-y\left(\frac{\mathbf{d} x}{\mathbf{d} y}\right) \\
& \frac{x^2-y^2+4}{2 x y}=\left(\frac{\mathbf{d} x}{\mathbf{d} y}\right) \\
& \Rightarrow 2 x y \mathbf{d} x-\left(x^2-y^2+4\right) \mathbf{d} y=0
\end{aligned} Then we get x 2 + y 2 − 2 x [ x − y ( d x d y ) ] − 4 = 0 ⇒ x 2 + y 2 − 4 = x − y ( d x d y ) x 2 + y 2 − 4 2 x − x = − y ( d x d y ) ⇒ − x 2 + y 2 − 4 2 x = − y ( d x d y ) x 2 − y 2 + 4 2 x y = ( d x d y ) ⇒ 2 x y d x − ( x 2 − y 2 + 4 ) d y = 0
2
x
y
d
x
+
(
y
2
−
x
2
−
4
)
d
y
=
0
(Equation 7)
2
x
y
d
x
+
(
y
2
−
x
2
−
4
)
d
y
=
0
(Equation 7)
2xydx+(y^(2)-x^(2)-4)dy=0quad(Equation 7) 2xy dx + (y^2-x^2-4) dy = 0 \quad \text{(Equation 7)} 2 x y d x + ( y 2 − x 2 − 4 ) d y = 0 (Equation 7) Where
M
=
2
M
=
2
M=2 M=2 M = 2 xy and
N
=
y
2
−
x
2
−
4
N
=
y
2
−
x
2
−
4
N=y^(2)-x^(2)-4 N=y^2-x^2-4 N = y 2 − x 2 − 4
∂
M
∂
y
=
2
x
,
∂
N
∂
x
=
−
2
x
∂
M
∂
y
=
2
x
,
∂
N
∂
x
=
−
2
x
(del M)/(del y)=2x,(del N)/(del x)=-2x \frac{\partial M}{\partial y}=2 x, \frac{\partial N}{\partial x}=-2 x ∂ M ∂ y = 2 x , ∂ N ∂ x = − 2 x This equation is not exact, but we can make it exact by multiplying by an integrating factor
I
F
I
F
IF IF I F , which is
1
y
2
1
y
2
(1)/(y^(2)) \frac{1}{y^2} 1 y 2 . Doing so, we get an exact equation:
1
M
(
∂
N
∂
x
−
∂
M
∂
y
)
=
1
2
x
y
(
−
2
x
−
2
x
)
=
−
4
x
2
x
y
=
−
2
y
I
.
F
=
e
−
∫
2
y
d
y
=
e
−
2
log
y
=
e
log
y
−
2
=
1
y
2
1
M
∂
N
∂
x
−
∂
M
∂
y
=
1
2
x
y
(
−
2
x
−
2
x
)
=
−
4
x
2
x
y
=
−
2
y
I
.
F
=
e
−
∫
2
y
d
y
=
e
−
2
log
y
=
e
log
y
−
2
=
1
y
2
{:[(1)/(M)((del N)/(del x)-(del M)/(del y))=(1)/(2xy)(-2x-2x)],[=-(4x)/(2xy)],[=-(2)/(y)],[I.F=e^(-int(2)/(y)dy)=e^(-2log y)=e^(log y^(-2))=(1)/(y^(2))]:} \begin{aligned}
& \frac{1}{M}\left(\frac{\partial N}{\partial x}-\frac{\partial M}{\partial y}\right)=\frac{1}{2 x y}(-2 x-2 x) \\
& =-\frac{4 x}{2 x y} \\
& =-\frac{2}{y} \\
& I . F=e^{-\int \frac{2}{y} \mathrm{~d} y}=e^{-2 \log y}=e^{\log y^{-2}}=\frac{1}{y^2}
\end{aligned} 1 M ( ∂ N ∂ x − ∂ M ∂ y ) = 1 2 x y ( − 2 x − 2 x ) = − 4 x 2 x y = − 2 y I . F = e − ∫ 2 y d y = e − 2 log y = e log y − 2 = 1 y 2 From (7)
2
x
y
y
d
x
+
y
2
−
x
2
−
y
y
2
d
y
=
0
2
x
y
y
d
x
+
y
2
−
x
2
−
y
y
2
d
y
=
0
(2xy)/(y)dx+(y^(2)-x^(2)-y)/(y^(2))dy=0 \frac{2 x y}{y} \mathbf{d} x+\frac{y^2-x^2-y}{y^2} \mathbf{d} y=0 2 x y y d x + y 2 − x 2 − y y 2 d y = 0
2
x
y
d
x
+
(
1
−
4
y
2
)
d
y
=
0
2
x
y
d
x
+
1
−
4
y
2
d
y
=
0
(2x)/(y)dx+(1-(4)/(y^(2)))dy=0 \frac{2x}{y} dx + \left(1-\frac{4}{y^2}\right) dy = 0 2 x y d x + ( 1 − 4 y 2 ) d y = 0 Which is an exact equation
∫
2
x
y
d
x
+
(
1
−
4
y
2
)
d
y
=
0
∫
2
x
y
d
x
+
1
−
4
y
2
d
y
=
0
int(2x)/(y)dx+(1-(4)/(y^(2)))dy=0 \int \frac{2 x}{y} \mathbf{d} x+\left(1-\frac{4}{y^2}\right) \mathbf{d} y=0 ∫ 2 x y d x + ( 1 − 4 y 2 ) d y = 0 Which is an exact equation
∫
2
x
y
d
x
+
∫
1
−
4
y
2
d
y
=
c
x
2
y
+
y
+
4
y
=
c
∫
2
x
y
d
x
+
∫
1
−
4
y
2
d
y
=
c
x
2
y
+
y
+
4
y
=
c
{:[ int(2x)/(y)dx+int1-(4)/(y^(2))dy=c],[(x^(2))/(y)+y+(4)/(y)=c]:} \begin{aligned}
& \int \frac{2 x}{y} \mathbf{d} x+\int 1-\frac{4}{y^2} \mathbf{d} y=c \\
& \frac{x^2}{y}+y+\frac{4}{y}=c
\end{aligned} ∫ 2 x y d x + ∫ 1 − 4 y 2 d y = c x 2 y + y + 4 y = c
x
2
y
+
(
y
+
4
y
)
=
c
x
2
y
+
y
+
4
y
=
c
(x^(2))/(y)+(y+(4)/(y))=c \frac{x^2}{y} + \left(y+\frac{4}{y}\right) = c x 2 y + ( y + 4 y ) = c Conclusion The orthogonal trajectories of the family of circles that pass through the points
(
0
,
2
)
(
0
,
2
)
(0,2) (0,2) ( 0 , 2 ) and
(
0
,
−
2
)
(
0
,
−
2
)
(0,-2) (0,-2) ( 0 , − 2 ) are described by the equation
x
2
y
+
(
y
+
4
y
)
=
c
x
2
y
+
y
+
4
y
=
c
(x^(2))/(y)+(y+(4)/(y))=c \frac{x^2}{y} + \left(y+\frac{4}{y}\right) = c x 2 y + ( y + 4 y ) = c .
(c)
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c के किस मान के लिए सदिश क्षेत्र
V
¯
=
(
−
4
x
−
3
y
+
a
z
)
i
^
+
(
b
x
+
3
y
+
5
z
)
j
^
+
(
4
x
+
c
y
+
3
z
)
k
^
V
¯
=
(
−
4
x
−
3
y
+
a
z
)
i
^
+
(
b
x
+
3
y
+
5
z
)
j
^
+
(
4
x
+
c
y
+
3
z
)
k
^
bar(V)=(-4x-3y+az) hat(i)+(bx+3y+5z) hat(j)+(4x+cy+3z) hat(k) \bar{V}=(-4 x-3 y+a z) \hat{i}+(b x+3 y+5 z) \hat{j}+(4 x+c y+3 z) \hat{k} V ¯ = ( − 4 x − 3 y + a z ) i ^ + ( b x + 3 y + 5 z ) j ^ + ( 4 x + c y + 3 z ) k ^ अघूर्णी है? तब
V
¯
V
¯
bar(V) \bar{V} V ¯ को अदिश फलन
ϕ
ϕ
phi \phi ϕ की प्रवणता के रूप में व्यक्त कीजिए।
ϕ
ϕ
phi \phi ϕ को ज्ञात कीजिए।
For what value of
a
,
b
,
c
a
,
b
,
c
a,b,c a, b, c a , b , c is the vector field
V
¯
=
(
−
4
x
−
3
y
+
a
z
)
i
^
+
(
b
x
+
3
y
+
5
z
)
j
^
+
(
4
x
+
c
y
+
3
z
)
k
^
V
¯
=
(
−
4
x
−
3
y
+
a
z
)
i
^
+
(
b
x
+
3
y
+
5
z
)
j
^
+
(
4
x
+
c
y
+
3
z
)
k
^
bar(V)=(-4x-3y+az) hat(i)+(bx+3y+5z) hat(j)+(4x+cy+3z) hat(k) \bar{V}=(-4 x-3 y+a z) \hat{i}+(b x+3 y+5 z) \hat{j}+(4 x+c y+3 z) \hat{k} V ¯ = ( − 4 x − 3 y + a z ) i ^ + ( b x + 3 y + 5 z ) j ^ + ( 4 x + c y + 3 z ) k ^ irrotational? Hence, express
V
¯
V
¯
bar(V) \bar{V} V ¯ as the gradient of a scalar function
ϕ
ϕ
phi \phi ϕ . Determine
ϕ
ϕ
phi \phi ϕ .
Answer:
Introduction:
We need to determine the values of
a
a
a a a ,
b
b
b b b , and
c
c
c c c for which the vector field
V
→
V
→
vec(V) \vec{V} V → is irrotational. Additionally, we want to express
V
→
V
→
vec(V) \vec{V} V → as the gradient of a scalar function
ϕ
ϕ
phi \phi ϕ and find the expression for
ϕ
ϕ
phi \phi ϕ .
Work/Calculations:
A vector field
v
→
v
→
vec(v) \vec{v} v → is irrotational if its curl,
∇
×
v
→
∇
×
v
→
grad xx vec(v) \nabla \times \vec{v} ∇ × v → , is equal to zero. The curl of
V
→
V
→
vec(V) \vec{V} V → is calculated as follows:
∇
×
V
→
=
|
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
−
4
x
−
3
y
+
a
z
b
x
+
3
y
+
5
z
4
x
+
c
y
+
3
z
|
=
i
(
c
−
5
)
−
j
(
4
−
a
)
+
k
(
b
+
3
)
∇
×
V
→
=
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
−
4
x
−
3
y
+
a
z
b
x
+
3
y
+
5
z
4
x
+
c
y
+
3
z
=
i
(
c
−
5
)
−
j
(
4
−
a
)
+
k
(
b
+
3
)
grad xx vec(V)=|[ hat(i), hat(j), hat(k)],[(del)/(del x),(del)/(del y),(del)/(del z)],[-4x-3y+az,bx+3y+5z,4x+cy+3z]|=i(c-5)-j(4-a)+k(b+3) \nabla \times \vec{V} =
\begin{vmatrix}
\hat{i} & \hat{j} & \hat{k} \\
\frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\
-4x-3y+az & bx+3y+5z & 4x+cy+3z
\end{vmatrix}
= i(c-5) – j(4-a) + k(b+3) ∇ × V → = | i ^ j ^ k ^ ∂ ∂ x ∂ ∂ y ∂ ∂ z − 4 x − 3 y + a z b x + 3 y + 5 z 4 x + c y + 3 z | = i ( c − 5 ) − j ( 4 − a ) + k ( b + 3 ) For
V
→
V
→
vec(V) \vec{V} V → to be irrotational, this expression must equal zero. Therefore, we have:
c
−
5
=
0
⟹
c
=
5
c
−
5
=
0
⟹
c
=
5
c-5=0Longrightarrowc=5 c – 5 = 0 \implies c = 5 c − 5 = 0 ⟹ c = 5
4
−
a
=
0
⟹
a
=
4
4
−
a
=
0
⟹
a
=
4
4-a=0Longrightarrowa=4 4 – a = 0 \implies a = 4 4 − a = 0 ⟹ a = 4
b
+
3
=
0
⟹
b
=
−
3
b
+
3
=
0
⟹
b
=
−
3
b+3=0Longrightarrowb=-3 b + 3 = 0 \implies b = -3 b + 3 = 0 ⟹ b = − 3 To express
V
→
V
→
vec(V) \vec{V} V → as the gradient of a scalar function
ϕ
ϕ
phi \phi ϕ , we have:
V
→
=
∇
ϕ
V
→
=
∇
ϕ
vec(V)=grad phi \vec{V} = \nabla \phi V → = ∇ ϕ Now, we have our
V
→
V
→
vec(V) \vec{V} V → as:
V
→
=
(
−
4
x
−
3
y
+
4
z
)
i
+
(
9
−
3
x
+
3
y
+
5
z
)
j
+
(
4
x
+
5
y
+
3
z
)
k
=
∂
ϕ
∂
x
i
+
∂
ϕ
∂
y
j
+
∂
ϕ
∂
z
k
(
1
)
V
→
=
(
−
4
x
−
3
y
+
4
z
)
i
+
(
9
−
3
x
+
3
y
+
5
z
)
j
+
(
4
x
+
5
y
+
3
z
)
k
=
∂
ϕ
∂
x
i
+
∂
ϕ
∂
y
j
+
∂
ϕ
∂
z
k
(
1
)
vec(V)=(-4x-3y+4z)i+(9-3x+3y+5z)j+(4x+5y+3z)k=(del phi)/(del x)i+(del phi)/(del y)j+(del phi)/(del z)k quad(1) \vec{V} = (-4 x-3 y+4 z) i+(9-3 x+3 y+5 z) j+(4 x+5 y+3 z) k=\frac{\partial \phi}{\partial x} i+\frac{\partial \phi}{\partial y} j+\frac{\partial \phi}{\partial z} k\quad (1) V → = ( − 4 x − 3 y + 4 z ) i + ( 9 − 3 x + 3 y + 5 z ) j + ( 4 x + 5 y + 3 z ) k = ∂ ϕ ∂ x i + ∂ ϕ ∂ y j + ∂ ϕ ∂ z k ( 1 ) Equating components:
∂
ϕ
∂
x
=
−
4
x
−
3
y
+
4
z
⟹
ϕ
=
−
2
x
2
−
3
x
y
+
4
x
z
+
f
1
(
y
,
z
)
(
2
)
∂
ϕ
∂
x
=
−
4
x
−
3
y
+
4
z
⟹
ϕ
=
−
2
x
2
−
3
x
y
+
4
x
z
+
f
1
(
y
,
z
)
(
2
)
(del phi)/(del x)=-4x-3y+4z quadLongrightarrowphi=-2x^(2)-3xy+4xz+f_(1)(y,z)quad(2) \frac{\partial \phi}{\partial x} = -4x-3y+4z \quad \implies \phi = -2x^2-3xy+4xz+f_1(y,z) \quad (2) ∂ ϕ ∂ x = − 4 x − 3 y + 4 z ⟹ ϕ = − 2 x 2 − 3 x y + 4 x z + f 1 ( y , z ) ( 2 )
∂
ϕ
∂
y
=
−
3
x
+
3
y
+
5
z
⟹
ϕ
=
−
3
x
y
+
3
2
y
2
+
5
y
z
+
f
2
(
x
,
y
)
(
3
)
∂
ϕ
∂
y
=
−
3
x
+
3
y
+
5
z
⟹
ϕ
=
−
3
x
y
+
3
2
y
2
+
5
y
z
+
f
2
(
x
,
y
)
(
3
)
(del phi)/(del y)=-3x+3y+5z quadLongrightarrowphi=-3xy+(3)/(2)y^(2)+5yz+f_(2)(x,y)quad(3) \frac{\partial \phi}{\partial y} = -3x+3y+5z \quad \implies \phi = -3xy+\frac{3}{2}y^2+5yz+f_2(x,y) \quad (3) ∂ ϕ ∂ y = − 3 x + 3 y + 5 z ⟹ ϕ = − 3 x y + 3 2 y 2 + 5 y z + f 2 ( x , y ) ( 3 )
∂
ϕ
∂
z
=
4
x
+
5
y
+
3
z
⟹
ϕ
=
4
x
z
+
5
y
z
+
3
2
z
2
+
f
3
(
x
,
y
)
(
4
)
∂
ϕ
∂
z
=
4
x
+
5
y
+
3
z
⟹
ϕ
=
4
x
z
+
5
y
z
+
3
2
z
2
+
f
3
(
x
,
y
)
(
4
)
(del phi)/(del z)=4x+5y+3z quadLongrightarrowphi=4xz+5yz+(3)/(2)z^(2)+f_(3)(x,y)quad(4) \frac{\partial \phi}{\partial z} = 4x+5y+3z \quad \implies \phi = 4xz+5yz+\frac{3}{2}z^2+f_3(x,y) \quad (4) ∂ ϕ ∂ z = 4 x + 5 y + 3 z ⟹ ϕ = 4 x z + 5 y z + 3 2 z 2 + f 3 ( x , y ) ( 4 ) These expressions for
ϕ
ϕ
phi \phi ϕ can be equated since they represent the same function
ϕ
ϕ
phi \phi ϕ . This gives us:
f
1
(
y
,
z
)
=
3
2
y
2
+
3
2
z
2
+
5
y
z
f
1
(
y
,
z
)
=
3
2
y
2
+
3
2
z
2
+
5
y
z
f_(1)(y,z)=(3)/(2)y^(2)+(3)/(2)z^(2)+5yz f_1(y,z) = \frac{3}{2}y^2+\frac{3}{2}z^2+5yz f 1 ( y , z ) = 3 2 y 2 + 3 2 z 2 + 5 y z
f
2
(
x
,
y
)
=
−
2
x
2
+
3
2
z
2
+
4
x
z
f
2
(
x
,
y
)
=
−
2
x
2
+
3
2
z
2
+
4
x
z
f_(2)(x,y)=-2x^(2)+(3)/(2)z^(2)+4xz f_2(x,y) = -2x^2+\frac{3}{2}z^2+4xz f 2 ( x , y ) = − 2 x 2 + 3 2 z 2 + 4 x z
f
3
(
x
,
y
)
=
−
2
x
2
+
3
2
y
2
−
3
x
y
f
3
(
x
,
y
)
=
−
2
x
2
+
3
2
y
2
−
3
x
y
f_(3)(x,y)=-2x^(2)+(3)/(2)y^(2)-3xy f_3(x,y) = -2x^2+\frac{3}{2}y^2-3xy f 3 ( x , y ) = − 2 x 2 + 3 2 y 2 − 3 x y So, our final expression for
ϕ
ϕ
phi \phi ϕ is:
ϕ
=
−
2
x
2
+
3
2
y
2
+
3
2
z
2
−
3
x
y
+
4
x
z
+
5
y
z
+
c
ϕ
=
−
2
x
2
+
3
2
y
2
+
3
2
z
2
−
3
x
y
+
4
x
z
+
5
y
z
+
c
phi=-2x^(2)+(3)/(2)y^(2)+(3)/(2)z^(2)-3xy+4xz+5yz+c \phi = -2x^2+\frac{3}{2}y^2+\frac{3}{2}z^2-3xy+4xz+5yz + c ϕ = − 2 x 2 + 3 2 y 2 + 3 2 z 2 − 3 x y + 4 x z + 5 y z + c Where
c
c
c c c is an arbitrary constant.
(d) एक एकसमान छड़, जो ऊर्ध्वर्धर दशा में है, अपने एक सिरे पर स्वतंत्र रूप से वर्तन कर सकती है तथा दूसरे सिरे पर लगाए गए एक क्षैतिज बल, जिसका मान छड़ के भार का आधा है, द्वारा ऊर्ध्वाधर से एक तरफ खींची जाती है। बताइए कि ऊर्ध्वाधर से किस कोण पर छड़ विश्राम करेगी।
A uniform rod, in vertical position, can turn freely about one of its ends and is pulled aside from the vertical by a horizontal force acting at the other end of the rod and equal to half its weight. At what inclination to the vertical will the rod rest?
Answer:
Forces in the System The forces acting on the system are:
The weight
W
W
W W W
A
B
A
B
AB AB A B The force
P
P
P P P
W
2
W
2
(W)/(2) \frac{W}{2} W 2 The reaction
R
R
R R R
A
A
A A A In equilibrium, these forces must intersect at a single point. Therefore, the reaction
R
R
R R R should pass through
O
O
O O O , the point of intersection of the directions of the forces
W
W
W W W and
W
2
W
2
(W)/(2) \frac{W}{2} W 2 .
Geometry and Trigonometry Let the length of the rod be
2
l
2
l
2l 2l 2 l , so
A
G
=
B
G
=
l
A
G
=
B
G
=
l
AG=BG=l AG = BG = l A G = B G = l .
In
△
A
B
C
△
A
B
C
/_\ABC \triangle ABC △ A B C , we have:
cos
θ
=
A
C
2
l
⟹
A
C
=
2
l
cos
θ
cos
θ
=
A
C
2
l
⟹
A
C
=
2
l
cos
θ
cos theta=(AC)/(2l)LongrightarrowAC=2l cos theta \cos \theta = \frac{AC}{2l} \implies AC = 2l \cos \theta cos θ = A C 2 l ⟹ A C = 2 l cos θ In
△
A
O
′
G
△
A
O
′
G
/_\AO^(‘)G \triangle AO’G △ A O ′ G , we have:
sin
θ
=
A
O
′
l
⟹
A
O
′
=
l
sin
θ
sin
θ
=
A
O
′
l
⟹
A
O
′
=
l
sin
θ
sin theta=(AO^(‘))/(l)LongrightarrowAO^(‘)=l sin theta \sin \theta = \frac{AO’}{l} \implies AO’ = l \sin \theta sin θ = A O ′ l ⟹ A O ′ = l sin θ Equilibrium Condition For the rod to be in equilibrium, the algebraic sum of the moments about point
A
A
A A A must be zero. Therefore, we have:
P
⋅
A
C
−
W
⋅
A
O
′
=
0
P
⋅
A
C
−
W
⋅
A
O
′
=
0
P*AC-W*AO^(‘)=0 P \cdot AC – W \cdot AO’ = 0 P ⋅ A C − W ⋅ A O ′ = 0 Substituting
P
=
W
2
P
=
W
2
P=(W)/(2) P = \frac{W}{2} P = W 2 and the expressions for
A
C
A
C
AC AC A C and
A
O
′
A
O
′
AO^(‘) AO’ A O ′ , we get:
W
2
⋅
2
l
cos
θ
−
W
⋅
l
sin
θ
=
0
W
2
⋅
2
l
cos
θ
−
W
⋅
l
sin
θ
=
0
(W)/(2)*2l cos theta-W*l sin theta=0 \frac{W}{2} \cdot 2l \cos \theta – W \cdot l \sin \theta = 0 W 2 ⋅ 2 l cos θ − W ⋅ l sin θ = 0 Simplifying, we find:
cos
θ
=
sin
θ
⟹
tan
θ
=
1
cos
θ
=
sin
θ
⟹
tan
θ
=
1
cos theta=sin thetaLongrightarrowtan theta=1 \cos \theta = \sin \theta \implies \tan \theta = 1 cos θ = sin θ ⟹ tan θ = 1
θ
=
tan
−
1
(
1
)
=
45
∘
θ
=
tan
−
1
(
1
)
=
45
∘
theta=tan^(-1)(1)=45^(@) \theta = \tan^{-1}(1) = 45^\circ θ = tan − 1 ( 1 ) = 45 ∘ Conclusion The rod will come to rest at an inclination of
45
∘
45
∘
45^(@) 45^\circ 45 ∘ to the vertical.
(e) एक हल्की दृढ़ छड़
A
B
C
A
B
C
ABC A B C A B C से तीन कण, जिनमें से हरेक का द्रव्यमान
m
m
m m m है,
A
,
B
A
,
B
A,B A, B A , B तथा
C
C
C C C पर बंधे हुए हैं। उस छड़ को बिंदु
A
A
A A A से
B
C
B
C
BC B C B C दूरी के बराबर स्थित बिंदु पर एक बल
P
P
P P P के द्वारा लम्बवत् मारा जाता है। सिद्ध कीजिए कि पैदा हुई गतिज ऊर्जा का मान
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
(1)/(2)(p^(2))/(m)(a^(2)-ab+b^(2))/(a^(2)+ab+b^(2)) \frac{1}{2} \frac{p^2}{m} \frac{a^2-a b+b^2}{a^2+a b+b^2} 1 2 p 2 m a 2 − a b + b 2 a 2 + a b + b 2 है, जहाँ
A
B
=
a
A
B
=
a
AB=a A B=a A B = a तथा
B
C
=
b
B
C
=
b
BC=b B C=b B C = b .
A light rigid rod
A
B
C
A
B
C
ABC A B C A B C has three particles each of mass
m
m
m m m attached to it at
A
,
B
A
,
B
A,B A, B A , B and
C
C
C C C . The rod is struck by a blow
P
P
P P P at right angles to it at a point distant from
A
A
A A A equal to
B
C
B
C
BC B C B C . Prove that the kinetic energy set up is
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
(1)/(2)(p^(2))/(m)(a^(2)-ab+b^(2))/(a^(2)+ab+b^(2)) \frac{1}{2} \frac{p^2}{m} \frac{a^2-a b+b^2}{a^2+a b+b^2} 1 2 p 2 m a 2 − a b + b 2 a 2 + a b + b 2 , where
A
B
=
a
A
B
=
a
AB=a A B=a A B = a and
B
C
=
b
B
C
=
b
BC=b B C=b B C = b .
Answer:
Let the three particles each of mass
m
m
m m m be placed at
A
,
B
,
C
A
,
B
,
C
A,B,C A, B, C A , B , C of a light rod
A
B
C
A
B
C
ABC A B C A B C , and let the impulse
P
P
P P P be applied at
O
O
O O O such that
A
O
=
B
C
=
b
A
O
=
B
C
=
b
AO=BC=b A O=B C=b A O = B C = b , where
A
B
=
a
,
B
C
=
b
A
B
=
a
,
B
C
=
b
AB=a,BC=b A B=a, B C=b A B = a , B C = b .
Initial Conditions and Variables
A
B
=
a
A
B
=
a
AB=a AB = a A B = a
B
C
=
b
B
C
=
b
BC=b BC = b B C = b
A
O
=
b
A
O
=
b
AO=b AO = b A O = b
u
′
u
′
u^(‘) u’ u ′
C
C
C C C
ω
ω
omega \omega ω Velocities of Points The velocities of the points
A
,
B
,
C
A
,
B
,
C
A,B,C A, B, C A , B , C and
O
O
O O O just after the blow are:
Velocity of
C
C
C C C
u
′
u
′
u^(‘) u’ u ′ Velocity of
B
B
B B B
u
+
b
ω
u
+
b
ω
u+b omega u + b\omega u + b ω Velocity of
A
A
A A A
u
+
(
a
+
b
)
ω
u
+
(
a
+
b
)
ω
u+(a+b)omega u + (a+b)\omega u + ( a + b ) ω Velocity of
O
O
O O O
u
+
a
ω
u
+
a
ω
u+a omega u + a\omega u + a ω Conservation of Momentum Since the system was initially at rest, the total momentum perpendicular to the rod must be equal to the impulse
P
P
P P P :
m
u
+
m
(
u
+
b
ω
)
+
m
{
u
+
(
a
+
b
)
ω
}
=
P
m
u
+
m
(
u
+
b
ω
)
+
m
{
u
+
(
a
+
b
)
ω
}
=
P
mu+m(u+b omega)+m{u+(a+b)omega}=P m u+m(u+b \omega)+m\{u+(a+b) \omega\}=P m u + m ( u + b ω ) + m { u + ( a + b ) ω } = P
3
u
+
ω
(
a
+
2
b
)
=
P
m
(1)
3
u
+
ω
(
a
+
2
b
)
=
P
m
(1)
3u+omega(a+2b)=(P)/(m)quad(1) 3u + \omega(a + 2b) = \frac{P}{m} \quad \text{(1)} 3 u + ω ( a + 2 b ) = P m (1) Moments About Point
O
O
O O O Taking moments about
O
O
O O O , we get:
{
u
+
(
a
+
b
)
}
b
−
m
(
u
+
b
ω
)
(
a
−
b
)
−
m
u
a
=
0
⇒
u
(
a
−
b
)
=
b
2
ω
.
∴
u
b
2
=
ω
a
−
b
⇒
3
u
+
(
a
+
2
b
)
ω
3
b
2
+
(
a
+
2
b
)
(
a
−
b
)
=
(
P
/
m
)
(
a
2
+
a
b
+
b
2
)
{
u
+
(
a
+
b
)
}
b
−
m
(
u
+
b
ω
)
(
a
−
b
)
−
m
u
a
=
0
⇒
u
(
a
−
b
)
=
b
2
ω
.
∴
u
b
2
=
ω
a
−
b
⇒
3
u
+
(
a
+
2
b
)
ω
3
b
2
+
(
a
+
2
b
)
(
a
−
b
)
=
(
P
/
m
)
a
2
+
a
b
+
b
2
{:[{u+(a+b)}b-m(u+b omega)(a-b)-mua=0=>u(a-b)=b^(2)omega.],[:.(u)/(b^(2))=(omega)/(a-b)=>(3u+(a+2b)omega)/(3b^(2)+(a+2b)(a-b))=((P//m))/((a^(2)+ab+b^(2)))]:} \begin{aligned}
& \{u+(a+b)\} b-m(u+b \omega)(a-b)-m u a=0 \Rightarrow u(a-b)=b^2 \omega . \\
& \therefore \frac{u}{b^2}=\frac{\omega}{a-b} \Rightarrow \frac{3 u+(a+2 b) \omega}{3 b^2+(a+2 b)(a-b)}=\frac{(P / m)}{\left(a^2+a b+b^2\right)}
\end{aligned} { u + ( a + b ) } b − m ( u + b ω ) ( a − b ) − m u a = 0 ⇒ u ( a − b ) = b 2 ω . ∴ u b 2 = ω a − b ⇒ 3 u + ( a + 2 b ) ω 3 b 2 + ( a + 2 b ) ( a − b ) = ( P / m ) ( a 2 + a b + b 2 ) Solving for
u
u
u u u
ω
ω
omega \omega ω From equations (1) and (2), we can solve for
u
u
u u u and
ω
ω
omega \omega ω :
u
=
b
2
a
2
+
a
b
+
b
2
P
m
and
ω
=
(
a
−
b
)
a
2
+
a
b
+
b
2
P
m
u
=
b
2
a
2
+
a
b
+
b
2
P
m
and
ω
=
(
a
−
b
)
a
2
+
a
b
+
b
2
P
m
u=(b^(2))/(a^(2)+ab+b^(2))(P)/(m)quad”and”quad omega=((a-b))/(a^(2)+ab+b^(2))(P)/(m) u = \frac{b^2}{a^2 + ab + b^2} \frac{P}{m} \quad \text{and} \quad \omega = \frac{(a-b)}{a^2 + ab + b^2} \frac{P}{m} u = b 2 a 2 + a b + b 2 P m and ω = ( a − b ) a 2 + a b + b 2 P m Velocity of Point
O
O
O O O The velocity of point
O
O
O O O is:
u
+
a
ω
=
P
m
1
m
(
a
2
+
b
2
+
a
b
)
[
b
2
+
a
(
a
−
b
)
]
=
a
2
+
b
2
−
a
b
a
2
+
b
2
+
a
b
⋅
P
m
u
+
a
ω
=
P
m
1
m
a
2
+
b
2
+
a
b
b
2
+
a
(
a
−
b
)
=
a
2
+
b
2
−
a
b
a
2
+
b
2
+
a
b
⋅
P
m
u+a omega=(P)/(m)(1)/(m(a^(2)+b^(2)+ab))[b^(2)+a(a-b)]=(a^(2)+b^(2)-ab)/(a^(2)+b^(2)+ab)*(P)/(m) u+a \omega=\frac{P}{m} \frac{1}{m\left(a^2+b^2+a b\right)}\left[b^2+a(a-b)\right]=\frac{a^2+b^2-a b}{a^2+b^2+a b} \cdot \frac{P}{m} u + a ω = P m 1 m ( a 2 + b 2 + a b ) [ b 2 + a ( a − b ) ] = a 2 + b 2 − a b a 2 + b 2 + a b ⋅ P m Kinetic Energy Finally, the kinetic energy
K
E
K
E
KE KE K E set up in the system is:
K
E
=
1
2
P
×
(velocity of point
O
)
=
1
2
P
2
(
a
2
+
b
2
−
a
b
)
m
(
a
2
+
a
b
+
b
2
)
K
E
=
1
2
P
×
(velocity of point
O
)
=
1
2
P
2
(
a
2
+
b
2
−
a
b
)
m
(
a
2
+
a
b
+
b
2
)
KE=(1)/(2)P xx(velocity of point O”)”=(1)/(2)(P^(2)(a^(2)+b^(2)-ab))/(m(a^(2)+ab+b^(2))) KE = \frac{1}{2} P \times \text{(velocity of point \( O \))} = \frac{1}{2} \frac{P^2(a^2 + b^2 – ab)}{m(a^2 + ab + b^2)} K E = 1 2 P × (velocity of point O ) = 1 2 P 2 ( a 2 + b 2 − a b ) m ( a 2 + a b + b 2 ) Conclusion The kinetic energy set up in the system is
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
1
2
p
2
m
a
2
−
a
b
+
b
2
a
2
+
a
b
+
b
2
(1)/(2)(p^(2))/(m)(a^(2)-ab+b^(2))/(a^(2)+ab+b^(2)) \frac{1}{2} \frac{p^2}{m} \frac{a^2-ab+b^2}{a^2+ab+b^2} 1 2 p 2 m a 2 − a b + b 2 a 2 + a b + b 2 , as required.
(a) प्राचल विचरण विधि का प्रयोग करके, निम्न अवकल समीकरण का हल निकालिए, यदि
y
=
e
−
x
y
=
e
−
x
y=e^(-x) y=e^{-x} y = e − x
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y^(”)+(1-cot x)y^(‘)-y cot x=sin^(2)x y^{\prime \prime}+(1-\cot x) y^{\prime}-y \cot x=\sin ^2 x y ′ ′ + ( 1 − cot x ) y ′ − y cot x = sin 2 x Using the method of variation of parameters, solve the differential equation
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y^(”)+(1-cot x)y^(‘)-y cot x=sin^(2)x y^{\prime \prime}+(1-\cot x) y^{\prime}-y \cot x=\sin ^2 x y ′ ′ + ( 1 − cot x ) y ′ − y cot x = sin 2 x , if
y
=
e
−
x
y
=
e
−
x
y=e^(-x) y=e^{-x} y = e − x is one solution of CF.
Answer:
Introduction:
We are tasked with solving the differential equation
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y
′
′
+
(
1
−
cot
x
)
y
′
−
y
cot
x
=
sin
2
x
y^(”)+(1-cot x)y^(‘)-y cot x=sin^(2)x y^{\prime \prime}+(1-\cot x) y^{\prime}-y \cot x=\sin ^2 x y ′ ′ + ( 1 − cot x ) y ′ − y cot x = sin 2 x , given that
y
=
e
−
x
y
=
e
−
x
y=e^(-x) y=e^{-x} y = e − x is one of its complementary function (CF) solutions. We’ll use the method of variation of parameters to find the particular solution.
Work/Calculations:
y
′
′
+
(
1
−
cot
x
)
y
′
−
cot
x
⋅
y
=
0
(2)
y
′
′
+
(
1
−
cot
x
)
y
′
−
cot
x
⋅
y
=
0
(2)
y^(”)+(1-cot x)y^(‘)-cot x*y=0quad(2) y^{\prime \prime}+(1-\cot x) y^{\prime}-\cot x \cdot y=0 \quad \text{(2)} y ′ ′ + ( 1 − cot x ) y ′ − cot x ⋅ y = 0 (2) Comparing this with the standard form
y
′
′
+
P
y
′
+
Q
y
=
0
y
′
′
+
P
y
′
+
Q
y
=
0
y^(”)+Py^(‘)+Qy=0 y^{\prime \prime}+P y^{\prime}+Q y=0 y ′ ′ + P y ′ + Q y = 0 , we have
P
=
1
−
cot
x
P
=
1
−
cot
x
P=1-cot x P = 1 – \cot x P = 1 − cot x and
Q
=
−
cot
x
Q
=
−
cot
x
Q=-cot x Q = -\cot x Q = − cot x . We also observe that
1
−
P
+
Q
=
1
−
(
1
−
cot
x
)
−
cot
x
=
0
1
−
P
+
Q
=
1
−
(
1
−
cot
x
)
−
cot
x
=
0
1-P+Q=1-(1-cot x)-cot x=0 1 – P + Q = 1 – (1 – \cot x) – \cot x = 0 1 − P + Q = 1 − ( 1 − cot x ) − cot x = 0 , which indicates that
u
=
e
−
x
u
=
e
−
x
u=e^(-x) u = e^{-x} u = e − x is a part of the CF of equation (2).
Now, we assume the complete solution of (2) as
y
=
u
⋅
v
y
=
u
⋅
v
y=u*v y = u \cdot v y = u ⋅ v . To find
v
v
v v v , we use the formula for the second derivative of a product:
d
2
v
d
x
2
+
(
P
+
2
u
d
u
d
x
)
d
v
d
x
=
R
y
d
2
v
d
x
2
+
P
+
2
u
d
u
d
x
d
v
d
x
=
R
y
(d^(2)v)/(dx^(2))+(P+(2)/(u)(du)/(dx))(dv)/(dx)=(R)/(y) \frac{d^2 v}{dx^2} + \left(P + \frac{2}{u} \frac{du}{dx}\right) \frac{dv}{dx} = \frac{R}{y} d 2 v d x 2 + ( P + 2 u d u d x ) d v d x = R y In our case,
P
=
1
−
cot
x
P
=
1
−
cot
x
P=1-cot x P = 1 – \cot x P = 1 − cot x and
u
=
e
−
x
u
=
e
−
x
u=e^(-x) u = e^{-x} u = e − x , so:
d
2
v
d
x
2
+
(
1
−
cot
x
+
2
e
−
x
(
−
e
−
x
)
)
d
v
d
x
=
0
d
2
v
d
x
2
+
1
−
cot
x
+
2
e
−
x
(
−
e
−
x
)
d
v
d
x
=
0
(d^(2)v)/(dx^(2))+(1-cot x+(2)/(e^(-x))(-e^(-x)))((dv)/(dx))=0 \frac{d^2 v}{dx^2} + \left(1 – \cot x + \frac{2}{e^{-x}}(-e^{-x})\right) \frac{dv}{dx} = 0 d 2 v d x 2 + ( 1 − cot x + 2 e − x ( − e − x ) ) d v d x = 0 This simplifies to:
d
2
v
d
x
2
−
(
1
+
cot
x
)
d
v
d
x
=
0
(3)
d
2
v
d
x
2
−
(
1
+
cot
x
)
d
v
d
x
=
0
(3)
(d^(2)v)/(dx^(2))-(1+cot x)(dv)/(dx)=0quad(3) \frac{d^2 v}{dx^2} – (1 + \cot x) \frac{dv}{dx} = 0 \quad \text{(3)} d 2 v d x 2 − ( 1 + cot x ) d v d x = 0 (3) Let
d
v
d
x
=
q
d
v
d
x
=
q
(dv)/(dx)=q \frac{dv}{dx} = q d v d x = q , which transforms equation (3) into:
d
q
d
x
−
(
1
+
cot
x
)
q
=
0
d
q
d
x
−
(
1
+
cot
x
)
q
=
0
(dq)/(dx)-(1+cot x)q=0 \frac{dq}{dx} – (1 + \cot x)q = 0 d q d x − ( 1 + cot x ) q = 0 Solving this first-order linear differential equation:
1
q
d
q
=
(
1
+
cot
x
)
d
x
1
q
d
q
=
(
1
+
cot
x
)
d
x
(1)/(q)dq=(1+cot x)dx \frac{1}{q} dq = (1 + \cot x)dx 1 q d q = ( 1 + cot x ) d x By Integrating
log
q
−
log
c
1
=
x
+
log
sin
x
⇒
q
=
c
1
e
x
sin
x
d
q
d
x
=
c
1
∫
e
x
sin
x
d
x
+
c
2
v
=
1
2
c
1
e
x
(
sin
x
−
cos
x
)
+
c
2
v
=
c
1
′
e
x
(
sin
x
−
cos
x
)
+
c
2
where
c
1
′
=
c
1
2
log
q
−
log
c
1
=
x
+
log
sin
x
⇒
q
=
c
1
e
x
sin
x
d
q
d
x
=
c
1
∫
e
x
sin
x
d
x
+
c
2
v
=
1
2
c
1
e
x
(
sin
x
−
cos
x
)
+
c
2
v
=
c
1
′
e
x
(
sin
x
−
cos
x
)
+
c
2
where
c
1
′
=
c
1
2
{:[log q-log c_(1)=x+log sin x],[=>q=c_(1)e^(x)sin x],[(dq)/(dx)=c_(1)inte^(x)sin xdx+c_(2)],[v=(1)/(2)c_(1)e^(x)(sin x-cos x)+c_(2)],[v=c_(1)^(‘)e^(x)(sin x-cos x)+c_(2)” where “c_(1)^(‘)=(c_(1))/(2)]:} \begin{aligned}
& \log q-\log c_1=x+\log \sin x \\
& \Rightarrow q=c_1 e^x \sin x \\
& \frac{\mathbf{d} q}{\mathbf{d} x}=c_1 \int e^x \sin x \mathbf{d} x+c_2 \\
& v=\frac{1}{2} c_1 e^x(\sin x-\cos x)+c_2 \\
& v=c_1^{\prime} e^x(\sin x-\cos x)+c_2 \text { where } c_1^{\prime}=\frac{c_1}{2}
\end{aligned} log q − log c 1 = x + log sin x ⇒ q = c 1 e x sin x d q d x = c 1 ∫ e x sin x d x + c 2 v = 1 2 c 1 e x ( sin x − cos x ) + c 2 v = c 1 ′ e x ( sin x − cos x ) + c 2 where c 1 ′ = c 1 2 Therefore, C. F of (2) is given by
y
c
=
e
−
x
{
c
1
′
e
x
(
sin
x
−
cos
x
)
+
c
2
}
y
c
=
c
1
′
(
sin
x
−
cos
x
)
+
c
2
e
−
x
y
c
=
e
−
x
c
1
′
e
x
(
sin
x
−
cos
x
)
+
c
2
y
c
=
c
1
′
(
sin
x
−
cos
x
)
+
c
2
e
−
x
{:[y_(c)=e^(-x){c_(1)^(‘)e^(x)(sin x-cos x)+c_(2)}],[y_(c)=c_(1)^(‘)(sin x-cos x)+c_(2)e^(-x)]:} \begin{aligned}
& y_c=e^{-x}\left\{c_1^{\prime} e^x(\sin x-\cos x)+c_2\right\} \\
& y_c=c_1^{\prime}(\sin x-\cos x)+c_2 e^{-x}
\end{aligned} y c = e − x { c 1 ′ e x ( sin x − cos x ) + c 2 } y c = c 1 ′ ( sin x − cos x ) + c 2 e − x Particular integral of (1)
y
p
=
U
f
(
x
)
+
V
g
(
x
)
→
y
p
=
U
f
(
x
)
+
V
g
(
x
)
→
y_(p)=Uf(x)+Vg(x)rarr y_p=U f(x)+V g(x) \rightarrow y p = U f ( x ) + V g ( x ) → (4)
Next, we proceed to find the particular integral
y
p
y
p
y_(p) y_p y p for the original equation (1). We’ve already determined
U
U
U U U and
V
V
V V V as
sin
x
−
cos
x
sin
x
−
cos
x
sin x-cos x \sin x – \cos x sin x − cos x and
e
−
x
e
−
x
e^(-x) e^{-x} e − x , respectively. Now, we need to calculate the Wronskian
W
W
W W W :
W
=
|
sin
x
−
cos
x
e
−
x
cos
x
+
sin
x
−
e
−
x
|
=
−
2
e
−
x
sin
x
W
=
sin
x
−
cos
x
e
−
x
cos
x
+
sin
x
−
e
−
x
=
−
2
e
−
x
sin
x
W=|[sin x-cos x,e^(-x)],[cos x+sin x,-e^(-x)]|=-2e^(-x)sin x W = \begin{vmatrix}
\sin x – \cos x & e^{-x} \\
\cos x + \sin x & -e^{-x}
\end{vmatrix} = -2 e^{-x} \sin x W = | sin x − cos x e − x cos x + sin x − e − x | = − 2 e − x sin x We use
W
W
W W W to find
f
(
x
)
f
(
x
)
f(x) f(x) f ( x ) :
Where
f
(
x
)
=
−
∫
V
W
d
x
=
−
∫
e
−
x
sin
2
x
−
2
e
−
x
sin
x
d
x
(
from
R
=
sin
2
x
)
=
1
2
∫
sin
2
x
d
x
=
−
1
2
cos
x
g
(
x
)
=
∫
U
R
W
=
∫
(
sin
x
−
cos
x
)
sin
2
x
−
2
e
−
x
sin
x
d
x
=
−
1
2
∫
e
x
(
sin
x
−
cos
x
)
sin
x
d
x
=
−
1
2
∫
e
x
(
sin
2
x
−
cos
x
sin
x
)
d
x
=
−
1
2
[
∫
e
x
(
1
−
cos
2
x
2
)
d
x
−
∫
e
x
sin
2
x
2
d
x
]
=
−
1
4
[
e
x
−
∫
e
x
cos
2
x
d
x
−
∫
e
x
sin
2
x
d
x
]
=
−
1
4
[
e
x
−
e
x
5
(
cos
2
x
+
2
sin
2
x
)
−
e
x
5
(
sin
x
−
2
cos
2
x
)
]
=
−
1
4
e
x
[
1
+
1
5
(
cos
2
x
−
3
sin
2
x
)
]
Where
f
(
x
)
=
−
∫
V
W
d
x
=
−
∫
e
−
x
sin
2
x
−
2
e
−
x
sin
x
d
x
from
R
=
sin
2
x
=
1
2
∫
sin
2
x
d
x
=
−
1
2
cos
x
g
(
x
)
=
∫
U
R
W
=
∫
(
sin
x
−
cos
x
)
sin
2
x
−
2
e
−
x
sin
x
d
x
=
−
1
2
∫
e
x
(
sin
x
−
cos
x
)
sin
x
d
x
=
−
1
2
∫
e
x
sin
2
x
−
cos
x
sin
x
d
x
=
−
1
2
∫
e
x
1
−
cos
2
x
2
d
x
−
∫
e
x
sin
2
x
2
d
x
=
−
1
4
e
x
−
∫
e
x
cos
2
x
d
x
−
∫
e
x
sin
2
x
d
x
=
−
1
4
e
x
−
e
x
5
(
cos
2
x
+
2
sin
2
x
)
−
e
x
5
(
sin
x
−
2
cos
2
x
)
=
−
1
4
e
x
1
+
1
5
(
cos
2
x
−
3
sin
2
x
)
{:[” Where “f(x)=-int(V)/(W)dx=-int(e^(-x)sin^(2)x)/(-2e^(-x)sin x)dx(” from “R=sin^(2)x)],[=(1)/(2)intsin^(2)xdx=-(1)/(2)cos x],[g(x)=int(UR)/(W)=int((sin x-cos x)sin^(2)x)/(-2e^(-x)sin x)dx],[=-(1)/(2)inte^(x)(sin x-cos x)sin xdx],[=-(1)/(2)inte^(x)(sin^(2)x-cos x sin x)dx],[=-(1)/(2)[inte^(x)((1-cos 2x)/(2))dx-inte^(x)(sin 2x)/(2)dx]],[=-(1)/(4)[e^(x)-inte^(x)cos 2xdx-inte^(x)sin 2xdx]],[=-(1)/(4)[e^(x)-(e^(x))/(5)(cos 2x+2sin 2x)-(e^(x))/(5)(sin x-2cos 2x)]],[=-(1)/(4)e^(x)[1+(1)/(5)(cos 2x-3sin 2x)]]:} \begin{aligned}
& \text { Where } f(x)=-\int \frac{V}{W} \mathbf{d} x=-\int \frac{e^{-x} \sin ^2 x}{-2 e^{-x} \sin x} \mathbf{d} x\left(\text { from } R=\sin ^2 x\right) \\
& =\frac{1}{2} \int \sin ^2 x \mathbf{d} x=-\frac{1}{2} \cos x \\
& g(x)=\int \frac{U R}{W}=\int \frac{(\sin x-\cos x) \sin ^2 x}{-2 e^{-x} \sin x} \mathbf{d} x \\
& =-\frac{1}{2} \int e^x(\sin x-\cos x) \sin x \mathbf{d} x \\
& =-\frac{1}{2} \int e^x\left(\sin ^2 x-\cos x \sin x\right) \mathbf{d} x \\
& =-\frac{1}{2}\left[\int e^x\left(\frac{1-\cos 2 x}{2}\right) \mathbf{d} x-\int e^x \frac{\sin 2 x}{2} \mathbf{d} x\right] \\
& =-\frac{1}{4}\left[e^x-\int e^x \cos 2 x \mathbf{d} x-\int e^x \sin 2 x \mathbf{d} x\right] \\
& =-\frac{1}{4}\left[e^x-\frac{e^x}{5}(\cos 2 x+2 \sin 2 x)-\frac{e^x}{5}(\sin x-2 \cos 2 x)\right] \\
& =-\frac{1}{4} e^x\left[1+\frac{1}{5}(\cos 2 x-3 \sin 2 x)\right]
\end{aligned} Where f ( x ) = − ∫ V W d x = − ∫ e − x sin 2 x − 2 e − x sin x d x ( from R = sin 2 x ) = 1 2 ∫ sin 2 x d x = − 1 2 cos x g ( x ) = ∫ U R W = ∫ ( sin x − cos x ) sin 2 x − 2 e − x sin x d x = − 1 2 ∫ e x ( sin x − cos x ) sin x d x = − 1 2 ∫ e x ( sin 2 x − cos x sin x ) d x = − 1 2 [ ∫ e x ( 1 − cos 2 x 2 ) d x − ∫ e x sin 2 x 2 d x ] = − 1 4 [ e x − ∫ e x cos 2 x d x − ∫ e x sin 2 x d x ] = − 1 4 [ e x − e x 5 ( cos 2 x + 2 sin 2 x ) − e x 5 ( sin x − 2 cos 2 x ) ] = − 1 4 e x [ 1 + 1 5 ( cos 2 x − 3 sin 2 x ) ] Now, let’s find
y
p
y
p
y_(p) y_p y p from equation (4):
y
p
=
−
1
2
cos
x
(
sin
x
−
cos
x
)
+
e
−
x
[
−
1
4
e
x
(
1
+
1
5
(
cos
2
x
−
3
sin
2
x
)
)
]
=
−
1
2
sin
x
cos
x
+
1
2
cos
2
x
−
1
4
−
1
20
(
cos
2
x
−
3
sin
2
x
)
=
−
1
4
sin
2
x
+
1
4
(
1
+
cos
2
x
)
−
1
4
−
1
20
(
cos
2
x
−
3
sin
2
x
)
=
1
20
(
4
cos
2
x
−
2
sin
2
x
)
=
1
10
(
2
cos
2
x
−
sin
2
x
)
y
=
y
c
+
y
p
y
=
c
1
(
sin
x
−
cos
x
)
+
c
2
e
−
x
+
1
10
(
2
cos
2
x
−
sin
2
x
)
y
p
=
−
1
2
cos
x
(
sin
x
−
cos
x
)
+
e
−
x
−
1
4
e
x
1
+
1
5
(
cos
2
x
−
3
sin
2
x
)
=
−
1
2
sin
x
cos
x
+
1
2
cos
2
x
−
1
4
−
1
20
(
cos
2
x
−
3
sin
2
x
)
=
−
1
4
sin
2
x
+
1
4
(
1
+
cos
2
x
)
−
1
4
−
1
20
(
cos
2
x
−
3
sin
2
x
)
=
1
20
(
4
cos
2
x
−
2
sin
2
x
)
=
1
10
(
2
cos
2
x
−
sin
2
x
)
y
=
y
c
+
y
p
y
=
c
1
(
sin
x
−
cos
x
)
+
c
2
e
−
x
+
1
10
(
2
cos
2
x
−
sin
2
x
)
{:[y_(p)=-(1)/(2)cos x(sin x-cos x)+e^(-x)[-(1)/(4)e^(x)(1+(1)/(5)(cos 2x-3sin 2x))]],[=-(1)/(2)sin x cos x+(1)/(2)cos^(2)x-(1)/(4)-(1)/(20)(cos 2x-3sin 2x)],[=-(1)/(4)sin 2x+(1)/(4)(1+cos 2x)-(1)/(4)-(1)/(20)(cos 2x-3sin 2x)],[=(1)/(20)(4cos 2x-2sin 2x)],[=(1)/(10)(2cos 2x-sin 2x)],[y=y_(c)+y_(p)],[y=c_(1)(sin x-cos x)+c_(2)e^(-x)+(1)/(10)(2cos 2x-sin 2x)]:} \begin{aligned}
& y_p=-\frac{1}{2} \cos x(\sin x-\cos x)+e^{-x}\left[-\frac{1}{4} e^x\left(1+\frac{1}{5}(\cos 2 x-3 \sin 2 x)\right)\right] \\
& =-\frac{1}{2} \sin x \cos x+\frac{1}{2} \cos ^2 x-\frac{1}{4}-\frac{1}{20}(\cos 2 x-3 \sin 2 x) \\
& =-\frac{1}{4} \sin 2 x+\frac{1}{4}(1+\cos 2 x)-\frac{1}{4}-\frac{1}{20}(\cos 2 x-3 \sin 2 x) \\
& =\frac{1}{20}(4 \cos 2 x-2 \sin 2 x) \\
& =\frac{1}{10}(2 \cos 2 x-\sin 2 x) \\
& y=y_c+y_p \\
& y=c_1(\sin x-\cos x)+c_2 e^{-x}+\frac{1}{10}(2 \cos 2 x-\sin 2 x)
\end{aligned} y p = − 1 2 cos x ( sin x − cos x ) + e − x [ − 1 4 e x ( 1 + 1 5 ( cos 2 x − 3 sin 2 x ) ) ] = − 1 2 sin x cos x + 1 2 cos 2 x − 1 4 − 1 20 ( cos 2 x − 3 sin 2 x ) = − 1 4 sin 2 x + 1 4 ( 1 + cos 2 x ) − 1 4 − 1 20 ( cos 2 x − 3 sin 2 x ) = 1 20 ( 4 cos 2 x − 2 sin 2 x ) = 1 10 ( 2 cos 2 x − sin 2 x ) y = y c + y p y = c 1 ( sin x − cos x ) + c 2 e − x + 1 10 ( 2 cos 2 x − sin 2 x ) Which is the required solution of given differential equation.
(b) दिए गए सदिश फलन
A
¯
A
¯
bar(A) \bar{A} A ¯ , जहाँ
A
¯
=
(
3
x
2
+
6
y
)
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
A
¯
=
3
x
2
+
6
y
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
bar(A)=(3x^(2)+6y) hat(i)-14 yz hat(j)+20 xz^(2) hat(k) \bar{A}=\left(3 x^2+6 y\right) \hat{i}-14 y z \hat{j}+20 x z^2 \hat{k} A ¯ = ( 3 x 2 + 6 y ) i ^ − 14 y z j ^ + 20 x z 2 k ^ , के लिए
∫
C
A
¯
⋅
d
r
¯
∫
C
A
¯
⋅
d
r
¯
int _(C) bar(A)*d bar(r) \int_C \bar{A} \cdot d \bar{r} ∫ C A ¯ ⋅ d r ¯ का मान निकालिए, जहाँ
C
C
C C C बिंदु
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) से
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) तक निम्न पर्थों से निर्देशित है :
(i)
x
=
t
,
y
=
t
2
,
z
=
t
3
x
=
t
,
y
=
t
2
,
z
=
t
3
x=t,y=t^(2),z=t^(3) x=t, y=t^2, z=t^3 x = t , y = t 2 , z = t 3
(ii) सरल रेखा
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) से
(
1
,
0
,
0
)
(
1
,
0
,
0
)
(1,0,0) (1,0,0) ( 1 , 0 , 0 ) तक जोड़ने पर, फिर
(
1
,
1
,
0
)
(
1
,
1
,
0
)
(1,1,0) (1,1,0) ( 1 , 1 , 0 ) तक तथा फिर
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) तक
(iii) सरल रेखा
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) से
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) तक जोड़ने पर
क्या सभी स्थितियों में परिणाम समान हैं? कारण की व्याख्या कीजिए।
For the vector function
A
¯
A
¯
bar(A) \bar{A} A ¯ , where
A
¯
=
(
3
x
2
+
6
y
)
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
A
¯
=
3
x
2
+
6
y
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
bar(A)=(3x^(2)+6y) hat(i)-14 yz hat(j)+20 xz^(2) hat(k) \bar{A}=\left(3 x^2+6 y\right) \hat{i}-14 y z \hat{j}+20 x z^2 \hat{k} A ¯ = ( 3 x 2 + 6 y ) i ^ − 14 y z j ^ + 20 x z 2 k ^ , calculate
∫
C
A
¯
⋅
d
r
¯
∫
C
A
¯
⋅
d
r
¯
int _(C) bar(A)*d bar(r) \int_C \bar{A} \cdot d \bar{r} ∫ C A ¯ ⋅ d r ¯ from
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) to
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) along the following paths :
(i)
x
=
t
,
y
=
t
2
,
z
=
t
3
x
=
t
,
y
=
t
2
,
z
=
t
3
x=t,y=t^(2),z=t^(3) x=t, y=t^2, z=t^3 x = t , y = t 2 , z = t 3
(ii) Straight lines joining
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) to
(
1
,
0
,
0
)
(
1
,
0
,
0
)
(1,0,0) (1,0,0) ( 1 , 0 , 0 ) , then to
(
1
,
1
,
0
)
(
1
,
1
,
0
)
(1,1,0) (1,1,0) ( 1 , 1 , 0 ) and then to
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 )
(iii) Straight line joining
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) to
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 )
Is the result same in all the cases? Explain the reason.
Answer:
Part (i): Path
x
=
t
,
y
=
t
2
,
z
=
t
3
x
=
t
,
y
=
t
2
,
z
=
t
3
x=t,y=t^(2),z=t^(3) x = t, y = t^2, z = t^3 x = t , y = t 2 , z = t 3 Vector
d
r
¯
d
r
¯
d bar(r) d\bar{r} d r ¯ For the curve
C
C
C C C , we have
d
r
¯
=
d
r
¯
d
t
d
t
=
(
i
+
2
t
j
+
3
t
2
k
)
d
t
d
r
¯
=
d
r
¯
d
t
d
t
=
(
i
+
2
t
j
+
3
t
2
k
)
d
t
d bar(r)=(d( bar(r)))/(dt)dt=(i+2tj+3t^(2)k)dt d\bar{r} = \frac{d\bar{r}}{dt} dt = (i + 2tj + 3t^2k)dt d r ¯ = d r ¯ d t d t = ( i + 2 t j + 3 t 2 k ) d t .
Limits of Integration The points
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 ) and
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) correspond to
t
=
0
t
=
0
t=0 t = 0 t = 0 and
t
=
1
t
=
1
t=1 t = 1 t = 1 , respectively.
Integral Calculation
∫
C
A
¯
⋅
d
r
¯
=
∫
0
1
[
(
3
t
2
+
6
t
2
)
i
−
14
t
2
t
3
j
+
20
t
(
t
3
)
2
k
]
⋅
(
i
+
2
t
j
+
3
t
2
k
)
d
t
=
∫
0
1
(
9
t
2
−
28
t
6
+
60
t
9
)
d
t
=
[
3
t
3
−
4
t
7
+
6
t
10
]
0
1
=
3
−
4
+
6
=
5
∫
C
A
¯
⋅
d
r
¯
=
∫
0
1
[
(
3
t
2
+
6
t
2
)
i
−
14
t
2
t
3
j
+
20
t
(
t
3
)
2
k
]
⋅
(
i
+
2
t
j
+
3
t
2
k
)
d
t
=
∫
0
1
(
9
t
2
−
28
t
6
+
60
t
9
)
d
t
=
3
t
3
−
4
t
7
+
6
t
10
0
1
=
3
−
4
+
6
=
5
{:[int _(C) bar(A)*d bar(r)=int_(0)^(1)[(3t^(2)+6t^(2))i-14t^(2)t^(3)j+20 t(t^(3))^(2)k]*(i+2tj+3t^(2)k)dt],[=int_(0)^(1)(9t^(2)-28t^(6)+60t^(9))dt],[=[3t^(3)-4t^(7)+6t^(10)]_(0)^(1)],[=3-4+6],[=5]:} \begin{aligned}
\int_C \bar{A} \cdot d\bar{r} &= \int_0^1 [(3t^2 + 6t^2)i – 14t^2t^3j + 20t(t^3)^2k] \cdot (i + 2tj + 3t^2k) dt \\
&= \int_0^1 (9t^2 – 28t^6 + 60t^9) dt \\
&= \left[3t^3 – 4t^7 + 6t^{10}\right]_0^1 \\
&= 3 – 4 + 6 \\
&= 5
\end{aligned} ∫ C A ¯ ⋅ d r ¯ = ∫ 0 1 [ ( 3 t 2 + 6 t 2 ) i − 14 t 2 t 3 j + 20 t ( t 3 ) 2 k ] ⋅ ( i + 2 t j + 3 t 2 k ) d t = ∫ 0 1 ( 9 t 2 − 28 t 6 + 60 t 9 ) d t = [ 3 t 3 − 4 t 7 + 6 t 10 ] 0 1 = 3 − 4 + 6 = 5 The integral along this path is 5.
Part (ii): Straight Lines Joining Points Path 1:
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 )
(
1
,
0
,
0
)
(
1
,
0
,
0
)
(1,0,0) (1,0,0) ( 1 , 0 , 0 ) For this path,
x
=
t
,
y
=
0
,
z
=
0
x
=
t
,
y
=
0
,
z
=
0
x=t,y=0,z=0 x = t, y = 0, z = 0 x = t , y = 0 , z = 0 and
0
≤
t
≤
1
0
≤
t
≤
1
0 <= t <= 1 0 \leq t \leq 1 0 ≤ t ≤ 1 .
∫
C
1
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
t
2
+
6
⋅
0
)
d
t
=
∫
0
1
3
t
2
d
t
=
[
t
3
]
0
1
=
1
−
0
=
1
∫
C
1
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
t
2
+
6
⋅
0
)
d
t
=
∫
0
1
3
t
2
d
t
=
t
3
0
1
=
1
−
0
=
1
{:[int_(C1) bar(A)*d bar(r)=int_(0)^(1)(3t^(2)+6*0)dt],[=int_(0)^(1)3t^(2)dt],[=[t^(3)]_(0)^(1)],[=1-0],[=1]:} \begin{aligned}
\int_{C1} \bar{A} \cdot d\bar{r} &= \int_0^1 (3t^2 + 6 \cdot 0) dt \\
&= \int_0^1 3t^2 dt \\
&= \left[ t^3 \right]_0^1 \\
&= 1 – 0 \\
&= 1
\end{aligned} ∫ C 1 A ¯ ⋅ d r ¯ = ∫ 0 1 ( 3 t 2 + 6 ⋅ 0 ) d t = ∫ 0 1 3 t 2 d t = [ t 3 ] 0 1 = 1 − 0 = 1 Path 2:
(
1
,
0
,
0
)
(
1
,
0
,
0
)
(1,0,0) (1,0,0) ( 1 , 0 , 0 )
(
1
,
1
,
0
)
(
1
,
1
,
0
)
(1,1,0) (1,1,0) ( 1 , 1 , 0 ) For this path,
x
=
1
,
y
=
t
,
z
=
0
x
=
1
,
y
=
t
,
z
=
0
x=1,y=t,z=0 x = 1, y = t, z = 0 x = 1 , y = t , z = 0 and
0
≤
t
≤
1
0
≤
t
≤
1
0 <= t <= 1 0 \leq t \leq 1 0 ≤ t ≤ 1 .
∫
C
2
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
⋅
1
2
+
6
t
)
d
t
=
∫
0
1
(
3
+
6
t
)
d
t
=
[
3
t
+
3
t
2
]
0
1
=
3
+
3
=
6
∫
C
2
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
⋅
1
2
+
6
t
)
d
t
=
∫
0
1
(
3
+
6
t
)
d
t
=
3
t
+
3
t
2
0
1
=
3
+
3
=
6
{:[int_(C2) bar(A)*d bar(r)=int_(0)^(1)(3*1^(2)+6t)dt],[=int_(0)^(1)(3+6t)dt],[=[3t+3t^(2)]_(0)^(1)],[=3+3],[=6]:} \begin{aligned}
\int_{C2} \bar{A} \cdot d\bar{r} &= \int_0^1 (3 \cdot 1^2 + 6t) dt \\
&= \int_0^1 (3 + 6t) dt \\
&= \left[ 3t + 3t^2 \right]_0^1 \\
&= 3 + 3 \\
&= 6
\end{aligned} ∫ C 2 A ¯ ⋅ d r ¯ = ∫ 0 1 ( 3 ⋅ 1 2 + 6 t ) d t = ∫ 0 1 ( 3 + 6 t ) d t = [ 3 t + 3 t 2 ] 0 1 = 3 + 3 = 6 Path 3:
(
1
,
1
,
0
)
(
1
,
1
,
0
)
(1,1,0) (1,1,0) ( 1 , 1 , 0 )
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) For this path,
x
=
1
,
y
=
1
,
z
=
t
x
=
1
,
y
=
1
,
z
=
t
x=1,y=1,z=t x = 1, y = 1, z = t x = 1 , y = 1 , z = t and
0
≤
t
≤
1
0
≤
t
≤
1
0 <= t <= 1 0 \leq t \leq 1 0 ≤ t ≤ 1 .
∫
C
3
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
⋅
1
2
+
6
⋅
1
)
−
14
⋅
1
⋅
t
+
20
⋅
1
⋅
t
2
d
t
=
∫
0
1
(
9
−
14
t
+
20
t
2
)
d
t
=
[
9
t
−
7
t
2
+
20
3
t
3
]
0
1
=
9
−
7
+
20
3
=
2
+
20
3
=
6
3
+
20
3
=
26
3
∫
C
3
A
¯
⋅
d
r
¯
=
∫
0
1
(
3
⋅
1
2
+
6
⋅
1
)
−
14
⋅
1
⋅
t
+
20
⋅
1
⋅
t
2
d
t
=
∫
0
1
(
9
−
14
t
+
20
t
2
)
d
t
=
9
t
−
7
t
2
+
20
3
t
3
0
1
=
9
−
7
+
20
3
=
2
+
20
3
=
6
3
+
20
3
=
26
3
{:[int_(C3) bar(A)*d bar(r)=int_(0)^(1)(3*1^(2)+6*1)-14*1*t+20*1*t^(2)dt],[=int_(0)^(1)(9-14 t+20t^(2))dt],[=[9t-7t^(2)+(20)/(3)t^(3)]_(0)^(1)],[=9-7+(20)/(3)],[=2+(20)/(3)],[=(6)/(3)+(20)/(3)],[=(26)/(3)]:} \begin{aligned}
\int_{C3} \bar{A} \cdot d\bar{r} &= \int_0^1 (3 \cdot 1^2 + 6 \cdot 1) – 14 \cdot 1 \cdot t + 20 \cdot 1 \cdot t^2 dt \\
&= \int_0^1 (9 – 14t + 20t^2) dt \\
&= \left[ 9t – 7t^2 + \frac{20}{3}t^3 \right]_0^1 \\
&= 9 – 7 + \frac{20}{3} \\
&= 2 + \frac{20}{3} \\
&= \frac{6}{3} + \frac{20}{3} \\
&= \frac{26}{3}
\end{aligned} ∫ C 3 A ¯ ⋅ d r ¯ = ∫ 0 1 ( 3 ⋅ 1 2 + 6 ⋅ 1 ) − 14 ⋅ 1 ⋅ t + 20 ⋅ 1 ⋅ t 2 d t = ∫ 0 1 ( 9 − 14 t + 20 t 2 ) d t = [ 9 t − 7 t 2 + 20 3 t 3 ] 0 1 = 9 − 7 + 20 3 = 2 + 20 3 = 6 3 + 20 3 = 26 3 Total Integral for Part (ii)
∫
C
A
¯
⋅
d
r
¯
=
1
+
6
+
26
3
=
7
+
26
3
=
21
3
+
26
3
=
47
3
∫
C
A
¯
⋅
d
r
¯
=
1
+
6
+
26
3
=
7
+
26
3
=
21
3
+
26
3
=
47
3
int _(C) bar(A)*d bar(r)=1+6+(26)/(3)=7+(26)/(3)=(21)/(3)+(26)/(3)=(47)/(3) \int_C \bar{A} \cdot d\bar{r} = 1 + 6 + \frac{26}{3} = 7 + \frac{26}{3} = \frac{21}{3} + \frac{26}{3} = \frac{47}{3} ∫ C A ¯ ⋅ d r ¯ = 1 + 6 + 26 3 = 7 + 26 3 = 21 3 + 26 3 = 47 3 Part (iii): Straight Line from
(
0
,
0
,
0
)
(
0
,
0
,
0
)
(0,0,0) (0,0,0) ( 0 , 0 , 0 )
(
1
,
1
,
1
)
(
1
,
1
,
1
)
(1,1,1) (1,1,1) ( 1 , 1 , 1 ) For this path,
x
=
t
,
y
=
t
,
z
=
t
x
=
t
,
y
=
t
,
z
=
t
x=t,y=t,z=t x = t, y = t, z = t x = t , y = t , z = t and
0
≤
t
≤
1
0
≤
t
≤
1
0 <= t <= 1 0 \leq t \leq 1 0 ≤ t ≤ 1 .
The vector field
A
¯
=
(
3
x
2
+
6
y
)
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
A
¯
=
(
3
x
2
+
6
y
)
i
^
−
14
y
z
j
^
+
20
x
z
2
k
^
bar(A)=(3x^(2)+6y) hat(i)-14 yz hat(j)+20 xz^(2) hat(k) \bar{A} = (3x^2 + 6y) \hat{i} – 14yz \hat{j} + 20xz^2 \hat{k} A ¯ = ( 3 x 2 + 6 y ) i ^ − 14 y z j ^ + 20 x z 2 k ^ .
The differential path element
d
r
¯
=
d
t
i
^
+
d
t
j
^
+
d
t
k
^
d
r
¯
=
d
t
i
^
+
d
t
j
^
+
d
t
k
^
d bar(r)=dt hat(i)+dt hat(j)+dt hat(k) d\bar{r} = dt \hat{i} + dt \hat{j} + dt \hat{k} d r ¯ = d t i ^ + d t j ^ + d t k ^ .
∫
C
A
¯
⋅
d
r
¯
=
∫
0
1
[
(
3
t
2
+
6
t
)
i
^
−
14
t
2
j
^
+
20
t
3
k
^
]
⋅
(
d
t
i
^
+
d
t
j
^
+
d
t
k
^
)
=
∫
0
1
(
3
t
2
+
6
t
)
d
t
−
∫
0
1
14
t
2
d
t
+
∫
0
1
20
t
3
d
t
=
[
3
3
t
3
+
3
t
2
]
0
1
−
[
14
3
t
3
]
0
1
+
[
20
4
t
4
]
0
1
=
1
+
3
−
14
3
+
5
=
4
−
14
3
+
5
=
9
−
14
3
=
27
3
−
14
3
=
13
3
∫
C
A
¯
⋅
d
r
¯
=
∫
0
1
[
(
3
t
2
+
6
t
)
i
^
−
14
t
2
j
^
+
20
t
3
k
^
]
⋅
(
d
t
i
^
+
d
t
j
^
+
d
t
k
^
)
=
∫
0
1
(
3
t
2
+
6
t
)
d
t
−
∫
0
1
14
t
2
d
t
+
∫
0
1
20
t
3
d
t
=
3
3
t
3
+
3
t
2
0
1
−
14
3
t
3
0
1
+
20
4
t
4
0
1
=
1
+
3
−
14
3
+
5
=
4
−
14
3
+
5
=
9
−
14
3
=
27
3
−
14
3
=
13
3
{:[int _(C) bar(A)*d bar(r)=int_(0)^(1)[(3t^(2)+6t) hat(i)-14t^(2) hat(j)+20t^(3) hat(k)]*(dt hat(i)+dt hat(j)+dt hat(k))],[=int_(0)^(1)(3t^(2)+6t)dt-int_(0)^(1)14t^(2)dt+int_(0)^(1)20t^(3)dt],[=[(3)/(3)t^(3)+3t^(2)]_(0)^(1)-[(14)/(3)t^(3)]_(0)^(1)+[(20)/(4)t^(4)]_(0)^(1)],[=1+3-(14)/(3)+5],[=4-(14)/(3)+5],[=9-(14)/(3)],[=(27)/(3)-(14)/(3)],[=(13)/(3)]:} \begin{aligned}
\int_C \bar{A} \cdot d\bar{r} &= \int_0^1 [(3t^2 + 6t) \hat{i} – 14t^2 \hat{j} + 20t^3 \hat{k}] \cdot (dt \hat{i} + dt \hat{j} + dt \hat{k}) \\
&= \int_0^1 (3t^2 + 6t) dt – \int_0^1 14t^2 dt + \int_0^1 20t^3 dt \\
&= \left[\frac{3}{3}t^3 + 3t^2\right]_0^1 – \left[\frac{14}{3}t^3\right]_0^1 + \left[\frac{20}{4}t^4\right]_0^1 \\
&= 1 + 3 – \frac{14}{3} + 5 \\
&= 4 – \frac{14}{3} + 5 \\
&= 9 – \frac{14}{3} \\
&= \frac{27}{3} – \frac{14}{3} \\
&= \frac{13}{3}
\end{aligned} ∫ C A ¯ ⋅ d r ¯ = ∫ 0 1 [ ( 3 t 2 + 6 t ) i ^ − 14 t 2 j ^ + 20 t 3 k ^ ] ⋅ ( d t i ^ + d t j ^ + d t k ^ ) = ∫ 0 1 ( 3 t 2 + 6 t ) d t − ∫ 0 1 14 t 2 d t + ∫ 0 1 20 t 3 d t = [ 3 3 t 3 + 3 t 2 ] 0 1 − [ 14 3 t 3 ] 0 1 + [ 20 4 t 4 ] 0 1 = 1 + 3 − 14 3 + 5 = 4 − 14 3 + 5 = 9 − 14 3 = 27 3 − 14 3 = 13 3 Summary For part (i), the integral is
5
5
5 5 5 .
For part (ii), the integral is
47
3
47
3
(47)/(3) \frac{47}{3} 47 3 .
For part (iii), the integral is
13
3
13
3
(13)/(3) \frac{13}{3} 13 3 .
The result is not the same for all paths, which indicates that the vector field
A
¯
A
¯
bar(A) \bar{A} A ¯ is not conservative. In a conservative vector field, the line integral is path-independent, meaning it would be the same for all paths between two points. Here, that is not the case.
(c) एक दंड
A
D
A
D
AD A D A D दो आलंब
B
B
B B B एवं
C
C
C C C पर विश्राम करता है, जबकि
A
B
=
B
C
=
C
D
A
B
=
B
C
=
C
D
AB=BC=CD A B=B C=C D A B = B C = C D . यह पाया गया कि दंड झुक जाएगा यदि एक भार
p
kg
p
kg
pkg p \mathrm{~kg} p kg , बिंदु
A
A
A A A से लटकाया जाए या एक भार
q
kg
q
kg
qkg q \mathrm{~kg} q kg , बिंदु
D
D
D D D से लटकाया जाए। दंड का भार बताइए।
A beam
A
D
A
D
AD A D A D rests on two supports
B
B
B B B and
C
C
C C C , where
A
B
=
B
C
=
C
D
A
B
=
B
C
=
C
D
AB=BC=CD A B=B C=C D A B = B C = C D . It is found that the beam will tilt when a weight of
p
kg
p
kg
pkg p \mathrm{~kg} p kg is hung from
A
A
A A A or when a weight of
q
kg
q
kg
qkg q \mathrm{~kg} q kg is hung from
D
D
D D D . Find the weight of the beam.
Answer:
Lengths of the segments:
A
B
=
B
C
=
C
D
=
a
A
B
=
B
C
=
C
D
=
a
AB=BC=CD=a AB = BC = CD = a A B = B C = C D = a Weight hung from
A
A
A A A
p
p
p p p Weight hung from
D
D
D D D
q
q
q q q Diagram Let
G
G
G G G be the center of gravity (C.G.) of the beam, where its weight
W
W
W W W acts. Let
B
G
=
x
B
G
=
x
BG=x BG = x B G = x .
Case 1: Weight
p
p
p p p
A
A
A A A When a weight
p
p
p p p is hung from
A
A
A A A , the beam tilts about
B
B
B B B , and the contact at
C
C
C C C is just about to break. Therefore, the torque due to
p
p
p p p must be balanced by the torque due to
W
W
W W W :
p
⋅
a
=
W
⋅
x
(Equation 1)
p
⋅
a
=
W
⋅
x
(Equation 1)
p*a=W*x quad(Equation 1) p \cdot a = W \cdot x \quad \text{(Equation 1)} p ⋅ a = W ⋅ x (Equation 1) Case 2: Weight
q
q
q q q
D
D
D D D When a weight
q
q
q q q is hung from
D
D
D D D , the beam tilts about
C
C
C C C , and the contact at
B
B
B B B is just about to break. Therefore, the torque due to
q
q
q q q must be balanced by the torque due to
W
W
W W W :
q
⋅
a
=
W
⋅
(
a
−
x
)
(Equation 2)
q
⋅
a
=
W
⋅
(
a
−
x
)
(Equation 2)
q*a=W*(a-x)quad(Equation 2) q \cdot a = W \cdot (a – x) \quad \text{(Equation 2)} q ⋅ a = W ⋅ ( a − x ) (Equation 2) Finding the Weight of the Beam Adding Equation 1 and Equation 2:
(
p
+
q
)
⋅
a
=
W
⋅
a
(
p
+
q
)
⋅
a
=
W
⋅
a
(p+q)*a=W*a (p + q) \cdot a = W \cdot a ( p + q ) ⋅ a = W ⋅ a Simplifying, we find:
W
=
p
+
q
W
=
p
+
q
W=p+q W = p + q W = p + q Conclusion The weight of the beam is
W
=
p
+
q
W
=
p
+
q
W=p+q W = p + q W = p + q kg.
(a) स्टोक्स प्रमेय को सत्यापित कीजिए, जबकि सदिश क्षेत्र
F
¯
=
x
y
i
^
+
y
z
j
^
+
x
z
k
^
F
¯
=
x
y
i
^
+
y
z
j
^
+
x
z
k
^
bar(F)=xy hat(i)+yz hat(j)+xz hat(k) \bar{F}=x y \hat{i}+y z \hat{j}+x z \hat{k} F ¯ = x y i ^ + y z j ^ + x z k ^
S
S
S S S
z
=
1
−
x
2
,
0
≤
x
≤
1
,
−
2
≤
y
≤
2
z
=
1
−
x
2
,
0
≤
x
≤
1
,
−
2
≤
y
≤
2
z=1-x^(2),0 <= x <= 1,-2 <= y <= 2 z=1-x^2, 0 \leq x \leq 1,-2 \leq y \leq 2 z = 1 − x 2 , 0 ≤ x ≤ 1 , − 2 ≤ y ≤ 2
S
S
S S S Verify the Stokes’ theorem for the vector field
F
¯
=
x
y
i
^
+
y
z
j
^
+
x
z
k
^
F
¯
=
x
y
i
^
+
y
z
j
^
+
x
z
k
^
bar(F)=xy hat(i)+yz hat(j)+xz hat(k) \bar{F}=x y \hat{i}+y z \hat{j}+x z \hat{k} F ¯ = x y i ^ + y z j ^ + x z k ^ on the surface
S
S
S S S which is the part of the cylinder
z
=
1
−
x
2
z
=
1
−
x
2
z=1-x^(2) z=1-x^2 z = 1 − x 2 for
0
≤
x
≤
1
,
−
2
≤
y
≤
2
0
≤
x
≤
1
,
−
2
≤
y
≤
2
0 <= x <= 1,-2 <= y <= 2 0 \leq x \leq 1,-2 \leq y \leq 2 0 ≤ x ≤ 1 , − 2 ≤ y ≤ 2 ;
S
S
S S S is oriented upwards.
Answer:
Stokes’ Theorem Stokes’ theorem states that
∮
C
F
→
⋅
d
r
→
=
∬
S
(
∇
×
F
→
)
⋅
n
^
d
S
∮
C
F
→
⋅
d
r
→
=
∬
S
(
∇
×
F
→
)
⋅
n
^
d
S
oint_(C) vec(F)*d vec(r)=∬_(S)(grad xx vec(F))* hat(n)dS \oint_C \vec{F} \cdot d\vec{r} = \iint_S (\nabla \times \vec{F}) \cdot \hat{n} dS ∮ C F → ⋅ d r → = ∬ S ( ∇ × F → ) ⋅ n ^ d S Line Integral Calculation The curve
C
C
C C C is the boundary of the surface
S
S
S S S , and it consists of four segments:
c
1
,
c
2
,
c
3
,
c
4
c
1
,
c
2
,
c
3
,
c
4
c_(1),c_(2),c_(3),c_(4) c_1, c_2, c_3, c_4 c 1 , c 2 , c 3 , c 4 .
Along
c
1
c
1
c_(1) c_1 c 1 The curve
c
1
c
1
c_(1) c_1 c 1 is defined by
x
2
+
z
=
1
x
2
+
z
=
1
x^(2)+z=1 x^2 + z = 1 x 2 + z = 1 and
y
=
−
2
y
=
−
2
y=-2 y = -2 y = − 2 . The differential
d
y
=
0
d
y
=
0
dy=0 dy = 0 d y = 0 .
∮
c
1
F
→
⋅
d
r
→
=
∫
0
1
(
−
2
x
d
x
+
x
(
1
−
x
2
)
(
−
2
x
d
x
)
)
=
−
19
15
∮
c
1
F
→
⋅
d
r
→
=
∫
0
1
(
−
2
x
d
x
+
x
(
1
−
x
2
)
(
−
2
x
d
x
)
)
=
−
19
15
oint_(c_(1)) vec(F)*d vec(r)=int_(0)^(1)(-2xdx+x(1-x^(2))(-2xdx))=-(19)/(15) \oint_{c_1} \vec{F} \cdot d\vec{r} = \int_0^1 (-2x dx + x(1-x^2)(-2x dx)) = -\frac{19}{15} ∮ c 1 F → ⋅ d r → = ∫ 0 1 ( − 2 x d x + x ( 1 − x 2 ) ( − 2 x d x ) ) = − 19 15 Along
c
2
c
2
c_(2) c_2 c 2 The curve
c
2
c
2
c_(2) c_2 c 2 is defined by
z
=
0
z
=
0
z=0 z = 0 z = 0 ,
x
=
1
x
=
1
x=1 x = 1 x = 1 , and
y
y
y y y varies from
−
2
−
2
-2 -2 − 2 to
2
2
2 2 2 . The differentials
d
x
=
0
d
x
=
0
dx=0 dx = 0 d x = 0 and
d
z
=
0
d
z
=
0
dz=0 dz = 0 d z = 0 .
∮
c
2
F
→
⋅
d
r
→
=
∫
−
2
2
0
d
y
=
0
∮
c
2
F
→
⋅
d
r
→
=
∫
−
2
2
0
d
y
=
0
oint_(c_(2)) vec(F)*d vec(r)=int_(-2)^(2)0dy=0 \oint_{c_2} \vec{F} \cdot d\vec{r} = \int_{-2}^2 0 dy = 0 ∮ c 2 F → ⋅ d r → = ∫ − 2 2 0 d y = 0 Along
c
3
c
3
c_(3) c_3 c 3 The curve
c
3
c
3
c_(3) c_3 c 3 is defined by
x
2
+
z
=
1
x
2
+
z
=
1
x^(2)+z=1 x^2 + z = 1 x 2 + z = 1 and
y
=
2
y
=
2
y=2 y = 2 y = 2 . The differential
d
y
=
0
d
y
=
0
dy=0 dy = 0 d y = 0 .
∮
c
3
F
→
⋅
d
r
→
=
∫
0
1
(
2
x
d
x
+
x
(
1
−
x
2
)
(
−
2
x
d
x
)
)
=
−
11
15
∮
c
3
F
→
⋅
d
r
→
=
∫
0
1
(
2
x
d
x
+
x
(
1
−
x
2
)
(
−
2
x
d
x
)
)
=
−
11
15
oint_(c_(3)) vec(F)*d vec(r)=int_(0)^(1)(2xdx+x(1-x^(2))(-2xdx))=-(11)/(15) \oint_{c_3} \vec{F} \cdot d\vec{r} = \int_0^1 (2x dx + x(1-x^2)(-2x dx)) = -\frac{11}{15} ∮ c 3 F → ⋅ d r → = ∫ 0 1 ( 2 x d x + x ( 1 − x 2 ) ( − 2 x d x ) ) = − 11 15 Along
c
4
c
4
c_(4) c_4 c 4 The curve
c
4
c
4
c_(4) c_4 c 4 is defined by
z
=
1
z
=
1
z=1 z = 1 z = 1 ,
x
=
0
x
=
0
x=0 x = 0 x = 0 , and
y
y
y y y varies from
−
2
−
2
-2 -2 − 2 to
2
2
2 2 2 . The differentials
d
x
=
0
d
x
=
0
dx=0 dx = 0 d x = 0 and
d
z
=
0
d
z
=
0
dz=0 dz = 0 d z = 0 .
∮
c
4
F
→
⋅
d
r
→
=
∫
−
2
2
0
d
y
=
0
∮
c
4
F
→
⋅
d
r
→
=
∫
−
2
2
0
d
y
=
0
oint_(c_(4)) vec(F)*d vec(r)=int_(-2)^(2)0dy=0 \oint_{c_4} \vec{F} \cdot d\vec{r} = \int_{-2}^2 0 dy = 0 ∮ c 4 F → ⋅ d r → = ∫ − 2 2 0 d y = 0 Adding all these together, we get:
∮
C
F
→
⋅
d
r
→
=
−
19
15
+
0
+
−
11
15
+
0
=
−
30
15
=
−
2
∮
C
F
→
⋅
d
r
→
=
−
19
15
+
0
+
−
11
15
+
0
=
−
30
15
=
−
2
oint_(C) vec(F)*d vec(r)=-(19)/(15)+0+-(11)/(15)+0=-(30)/(15)=-2 \oint_C \vec{F} \cdot d\vec{r} = -\frac{19}{15} + 0 + -\frac{11}{15} + 0 = -\frac{30}{15} = -2 ∮ C F → ⋅ d r → = − 19 15 + 0 + − 11 15 + 0 = − 30 15 = − 2 Surface Integral Calculation First, let’s find
∇
×
F
→
∇
×
F
→
grad xx vec(F) \nabla \times \vec{F} ∇ × F → :
∇
×
F
→
=
|
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
x
y
y
z
x
z
|
=
−
(
y
i
^
+
z
j
^
+
x
k
^
)
∇
×
F
→
=
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
x
y
y
z
x
z
=
−
(
y
i
^
+
z
j
^
+
x
k
^
)
grad xx vec(F)=|[ hat(i), hat(j), hat(k)],[(del)/(del x),(del)/(del y),(del)/(del z)],[xy,yz,xz]|=-(y hat(i)+z hat(j)+x hat(k)) \nabla \times \vec{F} = \left| \begin{array}{ccc}
\hat{i} & \hat{j} & \hat{k} \\
\frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\
xy & yz & xz
\end{array} \right| = -(y \hat{i} + z \hat{j} + x \hat{k}) ∇ × F → = | i ^ j ^ k ^ ∂ ∂ x ∂ ∂ y ∂ ∂ z x y y z x z | = − ( y i ^ + z j ^ + x k ^ ) The unit normal vector to the surface
S
S
S S S is given by
n
^
=
∇
ϕ
|
∇
ϕ
|
=
(
2
x
i
^
+
k
^
)
4
x
2
+
1
n
^
=
∇
ϕ
|
∇
ϕ
|
=
(
2
x
i
^
+
k
^
)
4
x
2
+
1
hat(n)=(grad phi)/(|grad phi|)=((2x( hat(i))+( hat(k))))/(sqrt(4x^(2)+1)) \hat{n} = \frac{\nabla \phi}{|\nabla \phi|} = \frac{(2x\hat{i} + \hat{k})}{\sqrt{4x^2 + 1}} n ^ = ∇ ϕ | ∇ ϕ | = ( 2 x i ^ + k ^ ) 4 x 2 + 1 The differential area element
d
S
d
S
dS dS d S in this case is
d
S
=
d
x
d
y
|
n
^
⋅
k
^
|
=
d
x
d
y
4
x
2
+
1
d
S
=
d
x
d
y
|
n
^
⋅
k
^
|
=
d
x
d
y
4
x
2
+
1
dS=(dxdy)/(|( hat(n))*( hat(k))|)=(dxdy)/(sqrt(4x^(2)+1)) dS = \frac{dxdy}{|\hat{n} \cdot \hat{k}|} = \frac{dxdy}{\sqrt{4x^2 + 1}} d S = d x d y | n ^ ⋅ k ^ | = d x d y 4 x 2 + 1 Now, let’s find the surface integral:
∬
S
(
∇
×
F
→
)
⋅
n
^
d
S
∬
S
(
∇
×
F
→
)
⋅
n
^
d
S
∬_(S)(grad xx vec(F))* hat(n)dS \iint_S (\nabla \times \vec{F}) \cdot \hat{n} dS ∬ S ( ∇ × F → ) ⋅ n ^ d S
=
∬
S
−
(
y
i
^
+
z
j
^
+
x
k
^
)
⋅
(
2
x
i
^
+
k
^
)
4
x
2
+
1
×
d
x
d
y
4
x
2
+
1
=
∬
S
−
(
y
i
^
+
z
j
^
+
x
k
^
)
⋅
(
2
x
i
^
+
k
^
)
4
x
2
+
1
×
d
x
d
y
4
x
2
+
1
=∬_(S)-(y hat(i)+z hat(j)+x hat(k))*((2x( hat(i))+( hat(k))))/(sqrt(4x^(2)+1))xx(dxdy)/(sqrt(4x^(2)+1)) = \iint_S -(y \hat{i} + z \hat{j} + x \hat{k}) \cdot \frac{(2x\hat{i} + \hat{k})}{\sqrt{4x^2 + 1}} \times \frac{dxdy}{\sqrt{4x^2 + 1}} = ∬ S − ( y i ^ + z j ^ + x k ^ ) ⋅ ( 2 x i ^ + k ^ ) 4 x 2 + 1 × d x d y 4 x 2 + 1 After Calculating, we get:
∬
S
(
−
2
x
y
−
x
)
d
x
d
y
4
x
2
+
1
∬
S
(
−
2
x
y
−
x
)
d
x
d
y
4
x
2
+
1
∬_(S)(-2xy-x)(dxdy)/((4x^(2)+1)) \iint_S (-2xy – x) \frac{dxdy}{{4x^2 + 1}} ∬ S ( − 2 x y − x ) d x d y 4 x 2 + 1 The limits for
x
x
x x x are from 0 to 1, and for
y
y
y y y are from -2 to 2.
z
=
1
−
x
2
z
=
1
−
x
2
z=1-x^(2) z = 1 – x^2 z = 1 − x 2 .
After Calculating, we get:
∬
S
(
−
2
x
y
−
x
)
d
x
d
y
4
x
2
+
1
=
0
∬
S
(
−
2
x
y
−
x
)
d
x
d
y
4
x
2
+
1
=
0
∬_(S)(-2xy-x)(dxdy)/((4x^(2)+1))=0 \iint_S(-2 x y-x) \frac{d x d y}{{4 x^2+1}}=0 ∬ S ( − 2 x y − x ) d x d y 4 x 2 + 1 = 0 Conclusion The line integral is
−
2
−
2
-2 -2 − 2 and the surface integral is
0
0
0 0 0 . Since these two values are not equal, Stokes’ theorem is not verified for this particular vector field and surface.
This could be due to the specific conditions or constraints of the surface and vector field in question.
(b) लाप्लास रूपांतरण का प्रयोग करके प्रारंभिक मान समस्या
t
y
′
′
+
2
t
y
′
+
2
y
=
2
;
y
(
0
)
=
1
t
y
′
′
+
2
t
y
′
+
2
y
=
2
;
y
(
0
)
=
1
ty^(”)+2ty^(‘)+2y=2;y(0)=1 t y^{\prime \prime}+2 t y^{\prime}+2 y=2 ; y(0)=1 t y ′ ′ + 2 t y ′ + 2 y = 2 ; y ( 0 ) = 1 तथा
y
′
(
0
)
y
′
(
0
)
y^(‘)(0) y^{\prime}(0) y ′ ( 0 ) स्वेच्छ है, को हल कीजिए। क्या इस प्रश्न का हल अद्वितीय है?
Using Laplace transform, solve the initial value problem
t
y
′
′
+
2
t
y
′
+
2
y
=
2
t
y
′
′
+
2
t
y
′
+
2
y
=
2
ty^(”)+2ty^(‘)+2y=2 t y^{\prime \prime}+2 t y^{\prime}+2 y=2 t y ′ ′ + 2 t y ′ + 2 y = 2 ;
y
(
0
)
=
1
y
(
0
)
=
1
y(0)=1 y(0)=1 y ( 0 ) = 1 and
y
′
(
0
)
y
′
(
0
)
y^(‘)(0) y^{\prime}(0) y ′ ( 0 ) is arbitrary. Does this problem have a unique solution?
Answer:
Using Laplace Transform to Solve the Initial Value Problem
Step 1: The Initial Differential Equation
Given the differential equation:
t
y
′
′
+
2
t
y
′
+
2
y
=
2
t
y
′
′
+
2
t
y
′
+
2
y
=
2
ty^(”)+2ty^(‘)+2y=2 t y^{\prime \prime}+2 t y^{\prime}+2 y=2 t y ′ ′ + 2 t y ′ + 2 y = 2 We’ll use the Laplace transform to solve it.
Step 2: Applying the Laplace Transform Property
We can use the property of Laplace transforms:
L
{
t
f
(
t
)
}
=
−
d
d
s
[
L
{
f
(
t
)
}
]
L
{
t
f
(
t
)
}
=
−
d
d
s
[
L
{
f
(
t
)
}
]
L{tf(t)}=-(d)/(ds)[L{f(t)}] L\{t f(t)\}=-\frac{d}{ds}[L\{f(t)\}] L { t f ( t ) } = − d d s [ L { f ( t ) } ] .
Now apply the Laplace transform to the given equation:
L
{
t
y
′
′
+
2
t
y
′
+
2
y
}
=
L
(
2
)
L
{
t
y
′
′
+
2
t
y
′
+
2
y
}
=
L
(
2
)
L{ty^(”)+2ty^(‘)+2y}=L(2) L\{t y^{\prime \prime}+2 t y^{\prime}+2 y\}=L(2) L { t y ′ ′ + 2 t y ′ + 2 y } = L ( 2 ) Step 3: Laplace Transform Calculation
Using the Laplace transform property and the initial conditions, we get:
−
d
d
s
[
s
2
y
¯
−
s
y
(
0
)
−
y
′
(
0
)
]
−
2
d
d
s
[
s
y
¯
−
y
(
0
)
]
+
2
y
¯
=
2
s
−
d
d
s
s
2
y
¯
−
s
y
(
0
)
−
y
′
(
0
)
−
2
d
d
s
[
s
y
¯
−
y
(
0
)
]
+
2
y
¯
=
2
s
-(d)/(ds)[s^(2)( bar(y))-sy(0)-y^(‘)(0)]-2(d)/(ds)[s bar(y)-y(0)]+2 bar(y)=(2)/(s) -\frac{d}{ds}\left[s^2 \bar{y}-s y(0)-y^{\prime}(0)\right]-2\frac{d}{ds}[s \bar{y}-y(0)]+2 \bar{y}=\frac{2}{s} − d d s [ s 2 y ¯ − s y ( 0 ) − y ′ ( 0 ) ] − 2 d d s [ s y ¯ − y ( 0 ) ] + 2 y ¯ = 2 s Given
y
(
0
)
y
(
0
)
y(0) y(0) y ( 0 ) and that
y
′
(
0
)
y
′
(
0
)
y^(‘)(0) y^{\prime}(0) y ′ ( 0 ) is an arbitrary constant
A
A
A A A :
−
d
d
s
[
s
2
y
¯
−
s
(
1
)
−
A
]
−
2
d
d
s
[
s
y
¯
−
1
]
+
2
y
¯
=
2
s
−
d
d
s
s
2
y
¯
−
s
(
1
)
−
A
−
2
d
d
s
[
s
y
¯
−
1
]
+
2
y
¯
=
2
s
-(d)/(ds)[s^(2)( bar(y))-s(1)-A]-2(d)/(ds)[s bar(y)-1]+2 bar(y)=(2)/(s) -\frac{d}{ds}\left[s^2 \bar{y}-s(1)-A\right]-2\frac{d}{ds}[s \bar{y}-1]+2 \bar{y}=\frac{2}{s} − d d s [ s 2 y ¯ − s ( 1 ) − A ] − 2 d d s [ s y ¯ − 1 ] + 2 y ¯ = 2 s Step 4: Simplification
Simplify the equation:
−
s
2
d
y
¯
d
s
−
2
s
y
¯
+
1
−
2
y
¯
−
2
s
d
y
¯
d
s
+
2
y
¯
=
2
s
−
s
2
d
y
¯
d
s
−
2
s
y
¯
+
1
−
2
y
¯
−
2
s
d
y
¯
d
s
+
2
y
¯
=
2
s
-s^(2)(d( bar(y)))/(ds)-2s bar(y)+1-2 bar(y)-2s(d( bar(y)))/(ds)+2 bar(y)=(2)/(s) -s^2 \frac{d \bar{y}}{ds}-2 s \bar{y}+1-2 \bar{y}-2 s \frac{d \bar{y}}{ds}+2 \bar{y}=\frac{2}{s} − s 2 d y ¯ d s − 2 s y ¯ + 1 − 2 y ¯ − 2 s d y ¯ d s + 2 y ¯ = 2 s
−
s
2
d
y
¯
d
s
−
2
s
y
¯
−
2
s
d
y
¯
d
s
=
2
s
−
1
−
s
2
d
y
¯
d
s
−
2
s
y
¯
−
2
s
d
y
¯
d
s
=
2
s
−
1
-s^(2)(d( bar(y)))/(ds)-2s bar(y)-2s(d( bar(y)))/(ds)=(2)/(s)-1 -s^2 \frac{d \bar{y}}{ds}-2 s \bar{y}-2 s \frac{d \bar{y}}{ds}=\frac{2}{s}-1 − s 2 d y ¯ d s − 2 s y ¯ − 2 s d y ¯ d s = 2 s − 1
−
(
s
2
+
2
s
)
d
y
¯
d
s
−
2
s
y
¯
=
2
s
−
1
−
(
s
2
+
2
s
)
d
y
¯
d
s
−
2
s
y
¯
=
2
s
−
1
-(s^(2)+2s)(d( bar(y)))/(ds)-2s bar(y)=(2)/(s)-1 -(s^2+2 s) \frac{d \bar{y}}{ds}-2 s \bar{y}=\frac{2}{s}-1 − ( s 2 + 2 s ) d y ¯ d s − 2 s y ¯ = 2 s − 1
d
y
¯
d
s
+
2
s
y
¯
s
(
s
+
2
)
=
(
1
−
2
s
)
1
s
(
s
+
2
)
→
(
1
)
d
y
¯
d
s
+
2
s
y
¯
s
(
s
+
2
)
=
1
−
2
s
1
s
(
s
+
2
)
→
(
1
)
(d( bar(y)))/(ds)+(2s( bar(y)))/(s(s+2))=(1-(2)/(s))(1)/(s(s+2))rarr(1) \frac{d \bar{y}}{ds}+\frac{2 s \bar{y}}{s(s+2)}=\left(1-\frac{2}{s}\right) \frac{1}{s(s+2)} \rightarrow(1) d y ¯ d s + 2 s y ¯ s ( s + 2 ) = ( 1 − 2 s ) 1 s ( s + 2 ) → ( 1 ) This is the linear differential equation.
Step 5: Integration Factor
Calculate the integration factor
I
.
F
I
.
F
I.F I.F I . F :
I
.
F
=
e
∫
2
s
s
(
s
+
2
)
d
s
=
e
∫
2
s
+
2
d
s
=
e
2
log
(
s
+
2
)
=
(
s
+
2
)
2
I
.
F
=
e
∫
2
s
s
(
s
+
2
)
d
s
=
e
∫
2
s
+
2
d
s
=
e
2
log
(
s
+
2
)
=
(
s
+
2
)
2
I.F=e^(int(2s)/(s(s+2))ds)=e^(int(2)/(s+2)ds)=e^(2log(s+2))=(s+2)^(2) I.F=e^{\int \frac{2 s}{s(s+2)} ds}=e^{\int \frac{2}{s+2} ds}=e^{2 \log (s+2)}=(s+2)^2 I . F = e ∫ 2 s s ( s + 2 ) d s = e ∫ 2 s + 2 d s = e 2 log ( s + 2 ) = ( s + 2 ) 2 Step 6: Solve the Differential Equation
The solution of (1) is given by:
y
¯
(
s
+
2
)
2
=
c
+
∫
(
1
−
2
s
)
1
s
(
s
+
2
)
(
s
+
2
)
2
d
s
y
¯
(
s
+
2
)
2
=
c
+
∫
1
−
2
s
1
s
(
s
+
2
)
(
s
+
2
)
2
d
s
bar(y)(s+2)^(2)=c+int(1-(2)/(s))(1)/(s(s+2))(s+2)^(2)ds \bar{y}(s+2)^2=c+\int\left(1-\frac{2}{s}\right) \frac{1}{s(s+2)}(s+2)^2 ds y ¯ ( s + 2 ) 2 = c + ∫ ( 1 − 2 s ) 1 s ( s + 2 ) ( s + 2 ) 2 d s
y
¯
(
s
+
2
)
2
=
c
+
∫
s
2
−
4
s
2
d
s
y
¯
(
s
+
2
)
2
=
c
+
∫
s
2
−
4
s
2
d
s
bar(y)(s+2)^(2)=c+int(s^(2)-4)/(s^(2))ds \bar{y}(s+2)^2=c+\int \frac{s^2-4}{s^2} ds y ¯ ( s + 2 ) 2 = c + ∫ s 2 − 4 s 2 d s
y
¯
(
s
+
2
)
2
=
c
+
∫
(
1
−
4
s
2
)
d
s
=
c
+
[
s
+
4
s
]
y
¯
(
s
+
2
)
2
=
c
+
∫
1
−
4
s
2
d
s
=
c
+
s
+
4
s
bar(y)(s+2)^(2)=c+int(1-(4)/(s^(2)))ds=c+[s+(4)/(s)] \bar{y}(s+2)^2=c+\int\left(1-\frac{4}{s^2}\right) ds=c+\left[s+\frac{4}{s}\right] y ¯ ( s + 2 ) 2 = c + ∫ ( 1 − 4 s 2 ) d s = c + [ s + 4 s ]
y
¯
=
c
(
s
+
2
)
2
+
s
2
+
4
s
(
s
+
2
)
2
y
¯
=
c
(
s
+
2
)
2
+
s
2
+
4
s
(
s
+
2
)
2
bar(y)=(c)/((s+2)^(2))+(s^(2)+4)/(s(s+2)^(2)) \bar{y}=\frac{c}{(s+2)^2}+\frac{s^2+4}{s(s+2)^2} y ¯ = c ( s + 2 ) 2 + s 2 + 4 s ( s + 2 ) 2
y
¯
=
(
s
+
2
)
2
−
4
s
s
(
s
+
2
)
2
+
c
(
s
+
2
)
2
=
1
s
−
4
(
s
+
2
)
2
+
c
(
s
+
2
)
2
y
¯
=
(
s
+
2
)
2
−
4
s
s
(
s
+
2
)
2
+
c
(
s
+
2
)
2
=
1
s
−
4
(
s
+
2
)
2
+
c
(
s
+
2
)
2
bar(y)=((s+2)^(2)-4s)/(s(s+2)^(2))+(c)/((s+2)^(2))=(1)/(s)-(4)/((s+2)^(2))+(c)/((s+2)^(2)) \bar{y}=\frac{(s+2)^2-4 s}{s(s+2)^2}+\frac{c}{(s+2)^2}=\frac{1}{s}-\frac{4}{(s+2)^2}+\frac{c}{(s+2)^2} y ¯ = ( s + 2 ) 2 − 4 s s ( s + 2 ) 2 + c ( s + 2 ) 2 = 1 s − 4 ( s + 2 ) 2 + c ( s + 2 ) 2 Step 7: Inverse Laplace Transform
Apply the inverse Laplace transform to obtain the solution in the time domain:
So, we have:
y
(
t
)
=
L
−
1
[
1
s
+
c
−
4
(
s
+
2
)
2
]
=
L
−
1
[
1
s
]
+
L
−
1
[
c
−
4
(
s
+
2
)
2
]
y
(
t
)
=
L
−
1
1
s
+
c
−
4
(
s
+
2
)
2
=
L
−
1
1
s
+
L
−
1
c
−
4
(
s
+
2
)
2
y(t)=L^(-1)[(1)/(s)+(c-4)/((s+2)^(2))]=L^(-1)[(1)/(s)]+L^(-1)[(c-4)/((s+2)^(2))] y(t)=L^{-1}\left[\frac{1}{s}+\frac{c-4}{(s+2)^2}\right]=L^{-1}\left[\frac{1}{s}\right]+L^{-1}\left[\frac{c-4}{(s+2)^2}\right] y ( t ) = L − 1 [ 1 s + c − 4 ( s + 2 ) 2 ] = L − 1 [ 1 s ] + L − 1 [ c − 4 ( s + 2 ) 2 ]
y
(
t
)
=
1
+
(
c
−
4
)
e
−
2
t
t
y
(
t
)
=
1
+
(
c
−
4
)
e
−
2
t
t
y(t)=1+(c-4)e^(-2t)t y(t)=1+(c-4) e^{-2 t} t y ( t ) = 1 + ( c − 4 ) e − 2 t t Conclusion
Hence, there are infinitely many solutions possible for any value of
c
c
c c c . This implies that the problem does not have a unique solution.
(c) (i) चार एकसमान भारी छड़, जो समान भार
W
W
W W W की हैं, एक वर्ग के रूप में ढाँचा बनाते हुए जुड़ी हैं। यह एक कोने से टँगा हुआ है। भार
W
W
W W W तीर्नों नीचे वाले हरेक कोने से लटकाए हैं। वर्ग का आकार एक हल्की छड़, जो क्षैतिज विकर्ण के अनुदिश है, द्वारा रक्षित किया गया है। उस हल्की छड़ पर प्रणोद निकालिए।
(ii) एक कण वेग
V
V
V V V से लंबी दूरी तय करने के लिए चलना शुरू करता है। एक तारे के केंद्र से कण के प्रारंभिक पथ की स्पर्श-रेखा पर लंबवत् दूरी
p
p
p p p है। दिखाइए कि कण की तारे के केंद्र से न्यूनतम दूरी
λ
λ
lambda \lambda λ है, जहाँ
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V^(2)lambda=sqrt(mu^(2)+p^(2)V^(4))-mu V^2 \lambda=\sqrt{\mu^2+p^2 V^4}-\mu V 2 λ = μ 2 + p 2 V 4 − μ . यहाँ
μ
μ
mu \mu μ एक अचर है।
(i) A square framework formed of uniform heavy rods of equal weight
W
W
W W W jointed together, is hung up by one corner. A weight
W
W
W W W is suspended from each of the three lower corners, and the shape of the square is preserved by a light rod along the horizontal diagonal. Find the thrust of the light rod.
Answer:
Finding the Thrust in the Light Rod
Step 1: Setup of the Problem
Consider a square framework
A
B
C
D
A
B
C
D
ABCD ABCD A B C D formed of four uniform rods, each with weight
W
W
W W W and length
2
a
2
a
2a 2a 2 a . The framework is suspended from corner
A
A
A A A , and a weight
W
W
W W W is suspended from each of the three lower corners,
B
B
B B B ,
C
C
C C C , and
D
D
D D D . A light rod along the horizontal diagonal
B
D
B
D
BD BD B D prevents the system from collapsing. We want to find the thrust
T
T
T T T in the light rod.
Step 2: Analysis of Forces
Let’s analyze the forces acting on the system. The total weight
4
W
4
W
4W 4W 4 W of the rods
A
B
A
B
AB AB A B ,
B
C
B
C
BC BC B C ,
C
D
C
D
CD CD C D , and
D
A
D
A
DA DA D A can be assumed to act at point
O
O
O O O . We need to find the thrust
T
T
T T T in the rod
B
D
B
D
BD BD B D .
Step 3: Displacement and Virtual Work
To find
T
T
T T T , we give the system a small symmetrical displacement about
A
C
A
C
AC AC A C , which causes
θ
θ
theta \theta θ to change to
θ
+
δ
θ
θ
+
δ
θ
theta+delta theta \theta + \delta \theta θ + δ θ . Point
A
A
A A A remains fixed, and points
B
B
B B B ,
O
O
O O O ,
D
D
D D D , and
C
C
C C C change their positions. The length of the rods
A
B
A
B
AB AB A B ,
B
C
B
C
BC BC B C ,
C
D
C
D
CD CD C D , and
D
A
D
A
DA DA D A remains constant, but the length
B
D
B
D
BD BD B D changes.
We have
B
D
=
2
B
O
=
2
A
B
sin
θ
=
4
a
sin
θ
B
D
=
2
B
O
=
2
A
B
sin
θ
=
4
a
sin
θ
BD=2BO=2AB sin theta=4a sin theta BD = 2BO = 2AB \sin \theta = 4a \sin \theta B D = 2 B O = 2 A B sin θ = 4 a sin θ , which is the depth of each of the points
B
B
B B B ,
C
C
C C C , and
D
D
D D D below the fixed point
A
A
A A A . Similarly,
A
O
=
2
a
cos
θ
A
O
=
2
a
cos
θ
AO=2a cos theta AO = 2a \cos \theta A O = 2 a cos θ is the depth of each of the points
B
B
B B B ,
C
C
C C C , and
D
D
D D D below
A
A
A A A , and the depth of
C
C
C C C below
A
A
A A A is
2
A
O
=
4
a
cos
θ
2
A
O
=
4
a
cos
θ
2AO=4a cos theta 2AO = 4a \cos \theta 2 A O = 4 a cos θ .
Step 4: Principle of Virtual Work
Applying the principle of virtual work, we have:
T
δ
(
4
a
sin
θ
)
+
4
W
δ
(
2
a
cos
θ
)
+
2
W
δ
(
2
a
cos
θ
)
+
W
δ
(
4
a
cos
θ
)
=
0
T
δ
(
4
a
sin
θ
)
+
4
W
δ
(
2
a
cos
θ
)
+
2
W
δ
(
2
a
cos
θ
)
+
W
δ
(
4
a
cos
θ
)
=
0
T delta(4a sin theta)+4W delta(2a cos theta)+2W delta(2a cos theta)+W delta(4a cos theta)=0 T \delta(4a \sin \theta) + 4W \delta(2a \cos \theta) + 2W \delta(2a \cos \theta) + W \delta(4a \cos \theta) = 0 T δ ( 4 a sin θ ) + 4 W δ ( 2 a cos θ ) + 2 W δ ( 2 a cos θ ) + W δ ( 4 a cos θ ) = 0 Simplifying:
4
a
T
cos
θ
δ
θ
−
8
a
W
sin
θ
δ
θ
−
4
a
W
sin
θ
δ
θ
−
4
a
W
sin
θ
δ
θ
=
0
4
a
T
cos
θ
δ
θ
−
8
a
W
sin
θ
δ
θ
−
4
a
W
sin
θ
δ
θ
−
4
a
W
sin
θ
δ
θ
=
0
4aT cos theta delta theta-8aW sin theta delta theta-4aW sin theta delta theta-4aW sin theta delta theta=0 4aT \cos \theta \delta \theta – 8aW \sin \theta \delta \theta – 4aW \sin \theta \delta \theta – 4aW \sin \theta \delta \theta = 0 4 a T cos θ δ θ − 8 a W sin θ δ θ − 4 a W sin θ δ θ − 4 a W sin θ δ θ = 0
4
a
[
T
cos
θ
−
4
W
sin
θ
]
δ
θ
=
0
4
a
[
T
cos
θ
−
4
W
sin
θ
]
δ
θ
=
0
4a[T cos theta-4W sin theta]delta theta=0 4a[T \cos \theta – 4W \sin \theta] \delta \theta = 0 4 a [ T cos θ − 4 W sin θ ] δ θ = 0 Since
δ
θ
≠
0
δ
θ
≠
0
delta theta!=0 \delta \theta \neq 0 δ θ ≠ 0 , we have:
T
cos
θ
−
4
W
sin
θ
=
0
T
cos
θ
−
4
W
sin
θ
=
0
T cos theta-4W sin theta=0 T \cos \theta – 4W \sin \theta = 0 T cos θ − 4 W sin θ = 0 Step 5: Finding Thrust
T
T
T T T Now, we can solve for
T
T
T T T :
T
=
4
W
tan
θ
T
=
4
W
tan
θ
T=4W tan theta T = 4W \tan \theta T = 4 W tan θ In the position of equilibrium,
θ
=
45
∘
θ
=
45
∘
theta=45^(@) \theta = 45^\circ θ = 45 ∘ , so:
T
=
4
W
tan
45
∘
=
4
W
T
=
4
W
tan
45
∘
=
4
W
T=4W tan 45^(@)=4W T = 4W \tan 45^\circ = 4W T = 4 W tan 45 ∘ = 4 W Therefore, the thrust
T
T
T T T in the light rod is equal to the total weight of the four rods, which is
4
W
4
W
4W 4W 4 W .
(ii) A particle starts at a great distance with velocity
V
V
V V V . Let
p
p
p p p be the length of the perpendicular from the centre of a star on the tangent to the initial path of the particle. Show that the least distance of the particle from the centre of the star is
λ
λ
lambda \lambda λ , where
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V^(2)lambda=sqrt(mu^(2)+p^(2)V^(4))-mu V^2 \lambda=\sqrt{\mu^2+p^2 V^4}-\mu V 2 λ = μ 2 + p 2 V 4 − μ . Here
μ
μ
mu \mu μ is a constant.
Answer:
Finding the Least Distance of the Particle from the Star’s Center
Step 1: Given Information
We are given that a particle starts at a great distance with velocity
V
V
V V V . Let
p
p
p p p be the length of the perpendicular from the center of a star on the tangent to the initial path of the particle. We want to show that the least distance of the particle from the center of the star is
λ
λ
lambda \lambda λ , where
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V^(2)lambda=sqrt(mu^(2)+p^(2)V^(4))-mu V^2 \lambda = \sqrt{\mu^2 + p^2 V^4} – \mu V 2 λ = μ 2 + p 2 V 4 − μ , and
μ
μ
mu \mu μ is a constant.
Step 2: The Hamiltonian and Energy of the Particle
The Hamiltonian and energy of the particle are given as follows:
E
=
H
(
x
,
x
∗
)
=
m
2
|
x
|
2
−
m
μ
|
x
|
E
=
H
(
x
,
x
∗
)
=
m
2
|
x
|
2
−
m
μ
|
x
|
E=H(x,x^(**))=(m)/(2)|x|^(2)-(m mu)/(|x|) E = H(x, x^*) = \frac{m}{2}|x|^2 – \frac{m \mu}{|x|} E = H ( x , x ∗ ) = m 2 | x | 2 − m μ | x | This gives us the second-order equation of motion:
x
∗
=
−
μ
x
|
x
|
3
x
∗
=
−
μ
x
|
x
|
3
x^(**)=-(mu x)/(|x|^(3)) x^* = -\frac{\mu x}{|x|^3} x ∗ = − μ x | x | 3 By the initial conditions, we have
E
=
1
2
m
V
2
E
=
1
2
m
V
2
E=(1)/(2)mV^(2) E = \frac{1}{2} m V^2 E = 1 2 m V 2 .
Step 3: Polar Coordinates
Now, let’s write the equation in polar coordinates. We have:
L
=
r
2
θ
˙
L
=
r
2
θ
˙
L=r^(2)theta^(˙) L = r^2 \dot{\theta} L = r 2 θ ˙ as the constant angular momentum, and the energy equation becomes:
E
=
1
2
m
(
r
˙
2
+
r
2
θ
˙
2
)
−
m
μ
r
E
=
1
2
m
r
˙
2
+
r
2
θ
˙
2
−
m
μ
r
E=(1)/(2)m(r^(˙)^(2)+r^(2)theta^(˙)^(2))-(m mu)/(r) E = \frac{1}{2} m \left(\dot{r}^2 + r^2 \dot{\theta}^2\right) – \frac{m \mu}{r} E = 1 2 m ( r ˙ 2 + r 2 θ ˙ 2 ) − m μ r
V
2
=
r
˙
2
+
L
2
r
2
−
2
μ
r
V
2
=
r
˙
2
+
L
2
r
2
−
2
μ
r
V^(2)=r^(˙)^(2)+(L^(2))/(r^(2))-(2mu)/(r) V^2 = \dot{r}^2 + \frac{L^2}{r^2} – \frac{2 \mu}{r} V 2 = r ˙ 2 + L 2 r 2 − 2 μ r Step 4: Determining
L
L
L L L To find the least distance of the particle from the center of the star, we need to determine
L
L
L L L at the point of closest approach,
r
=
λ
r
=
λ
r=lambda r = \lambda r = λ , where
r
=
0
r
=
0
r=0 r = 0 r = 0 .
For large
r
r
r r r , the trajectory is given as:
X
=
(
x
,
y
)
=
(
p
,
y
0
−
V
t
)
X
=
(
x
,
y
)
=
(
p
,
y
0
−
V
t
)
X=(x,y)=(p,y_(0)-Vt) X = (x, y) = (p, y_0 – Vt) X = ( x , y ) = ( p , y 0 − V t ) So,
L
=
r
2
ϕ
˙
=
x
˙
y
−
x
y
˙
=
−
p
V
L
=
r
2
ϕ
˙
=
x
˙
y
−
x
y
˙
=
−
p
V
L=r^(2)phi^(˙)=x^(˙)y-xy^(˙)=-pV L = r^2 \dot{\phi } = \dot xy – x\dot y = -pV L = r 2 ϕ ˙ = x ˙ y − x y ˙ = − p V Thus, the equation for
r
=
λ
r
=
λ
r=lambda r = \lambda r = λ is:
V
2
λ
2
+
2
μ
λ
=
p
2
V
2
V
2
λ
2
+
2
μ
λ
=
p
2
V
2
V^(2)lambda^(2)+2mu lambda=p^(2)V^(2) V^2 \lambda^2 + 2 \mu \lambda = p^2 V^2 V 2 λ 2 + 2 μ λ = p 2 V 2
(
V
2
λ
+
μ
)
2
=
p
2
V
4
+
μ
2
(
V
2
λ
+
μ
)
2
=
p
2
V
4
+
μ
2
(V^(2)lambda+mu)^(2)=p^(2)V^(4)+mu^(2) (V^2 \lambda + \mu)^2 = p^2 V^4 + \mu^2 ( V 2 λ + μ ) 2 = p 2 V 4 + μ 2 This establishes the desired result:
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V
2
λ
=
μ
2
+
p
2
V
4
−
μ
V^(2)lambda=sqrt(mu^(2)+p^(2)V^(4))-mu V^2 \lambda = \sqrt{\mu^2 + p^2 V^4} – \mu V 2 λ = μ 2 + p 2 V 4 − μ Therefore, the least distance of the particle from the center of the star is indeed
λ
λ
lambda \lambda λ as given in the problem statement.
(a) (i) निम्न अवकल समीकरण हल कीजिए :
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(x+1)^(2)y^(”)-4(x+1)y^(‘)+6y=6(x+1)^(2)+sin log(x+1) (x+1)^2 y^{\prime \prime}-4(x+1) y^{\prime}+6 y=6(x+1)^2+\sin \log (x+1) ( x + 1 ) 2 y ′ ′ − 4 ( x + 1 ) y ′ + 6 y = 6 ( x + 1 ) 2 + sin log ( x + 1 ) (ii) अवकल समीकरण
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9p^(2)(2-y)^(2)=4(3-y) 9 p^2(2-y)^2=4(3-y) 9 p 2 ( 2 − y ) 2 = 4 ( 3 − y ) के व्यापक व विचित्र हल निकालिए, जहाँ
p
=
d
y
d
x
p
=
d
y
d
x
p=(dy)/(dx) p=\frac{d y}{d x} p = d y d x .
(i) Solve the following differential equation :
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(x+1)^(2)y^(”)-4(x+1)y^(‘)+6y=6(x+1)^(2)+sin log(x+1) (x+1)^2 y^{\prime \prime}-4(x+1) y^{\prime}+6 y=6(x+1)^2+\sin \log (x+1) ( x + 1 ) 2 y ′ ′ − 4 ( x + 1 ) y ′ + 6 y = 6 ( x + 1 ) 2 + sin log ( x + 1 ) Answer:
Solving the Differential Equation
Given the differential equation:
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(
x
+
1
)
2
y
′
′
−
4
(
x
+
1
)
y
′
+
6
y
=
6
(
x
+
1
)
2
+
sin
log
(
x
+
1
)
(x+1)^(2)y^(”)-4(x+1)y^(‘)+6y=6(x+1)^(2)+sin log(x+1) (x+1)^2 y^{\prime \prime}-4(x+1) y^{\prime}+6 y=6(x+1)^2+\sin \log (x+1) ( x + 1 ) 2 y ′ ′ − 4 ( x + 1 ) y ′ + 6 y = 6 ( x + 1 ) 2 + sin log ( x + 1 ) Step 1: Change of Variables
Let
(
x
+
1
)
=
e
z
⇒
log
(
1
+
x
)
=
z
(
x
+
1
)
=
e
z
⇒
log
(
1
+
x
)
=
z
(x+1)=e^(z)=>log(1+x)=z (x+1)=e^z \Rightarrow \log (1+x)=z ( x + 1 ) = e z ⇒ log ( 1 + x ) = z , and let
D
1
=
d
d
z
D
1
=
d
d
z
D_(1)=(d)/(dz) D_1=\frac{d}{dz} D 1 = d d z . Then
(
1
+
x
)
D
=
D
1
(
1
+
x
)
D
=
D
1
(1+x)D=D_(1) (1+x) D=D_1 ( 1 + x ) D = D 1 , and
(
1
+
x
)
2
D
2
=
D
1
(
D
1
−
1
)
(
1
+
x
)
2
D
2
=
D
1
(
D
1
−
1
)
(1+x)^(2)D^(2)=D_(1)(D_(1)-1) (1+x)^2 D^2=D_1(D_1-1) ( 1 + x ) 2 D 2 = D 1 ( D 1 − 1 ) .
The equation becomes:
(
D
1
(
D
1
−
1
)
−
4
D
1
+
6
)
y
=
6
e
2
z
+
sin
z
D
1
(
D
1
−
1
)
−
4
D
1
+
6
y
=
6
e
2
z
+
sin
z
(D_(1)(D_(1)-1)-4D_(1)+6)y=6e^(2z)+sin z \left(D_1(D_1-1)-4D_1+6\right)y=6e^{2z}+\sin z ( D 1 ( D 1 − 1 ) − 4 D 1 + 6 ) y = 6 e 2 z + sin z Step 2: Auxiliary Equation
To solve the auxiliary equation, we have:
D
1
2
−
5
D
1
+
6
=
0
⇒
D
1
2
−
3
D
1
−
2
D
1
+
6
=
0
⇒
D
1
(
D
1
−
3
)
−
2
(
D
1
−
3
)
=
0
⇒
D
1
=
2
,
3
D
1
2
−
5
D
1
+
6
=
0
⇒
D
1
2
−
3
D
1
−
2
D
1
+
6
=
0
⇒
D
1
(
D
1
−
3
)
−
2
(
D
1
−
3
)
=
0
⇒
D
1
=
2
,
3
{:[D_(1)^(2)-5D_(1)+6=0],[=>D_(1)^(2)-3D_(1)-2D_(1)+6=0],[=>D_(1)(D_(1)-3)-2(D_(1)-3)=0],[=>D_(1)=2″,”3]:} \begin{aligned}
& D_1^2-5D_1+6=0 \\
& \Rightarrow D_1^2-3D_1-2D_1+6=0 \\
& \Rightarrow D_1(D_1-3)-2(D_1-3)=0 \\
& \Rightarrow D_1=2,3
\end{aligned} D 1 2 − 5 D 1 + 6 = 0 ⇒ D 1 2 − 3 D 1 − 2 D 1 + 6 = 0 ⇒ D 1 ( D 1 − 3 ) − 2 ( D 1 − 3 ) = 0 ⇒ D 1 = 2 , 3 Therefore, the complementary function (C.F) is:
c
1
e
2
z
+
c
2
e
3
z
=
c
1
(
x
+
1
)
2
+
c
2
(
x
+
1
)
3
(1)
c
1
e
2
z
+
c
2
e
3
z
=
c
1
(
x
+
1
)
2
+
c
2
(
x
+
1
)
3
(1)
c_(1)e^(2z)+c_(2)e^(3z)=c_(1)(x+1)^(2)+c_(2)(x+1)^(3)quad(1) c_1 e^{2z}+c_2 e^{3z}=c_1(x+1)^2+c_2(x+1)^3 \quad \text{(1)} c 1 e 2 z + c 2 e 3 z = c 1 ( x + 1 ) 2 + c 2 ( x + 1 ) 3 (1) Step 3: Particular Integral
For the particular integral (P.I), we have:
P
.
I
:
6
e
2
z
+
sin
z
(
D
1
−
2
)
(
D
1
−
3
)
=
6
e
2
z
(
D
1
−
2
)
(
D
1
−
3
)
+
sin
z
D
1
2
−
5
D
1
+
6
=
−
6
e
2
z
D
1
−
2
+
sin
z
−
1
+
6
−
5
D
=
−
6
e
2
z
z
1
!
+
sin
z
5
(
1
−
D
1
)
=
−
6
z
e
2
z
+
(
1
+
D
1
)
sin
z
5
(
1
−
D
1
)
(
1
+
D
1
)
=
−
6
z
e
2
z
+
sin
z
+
cos
z
5
(
1
−
D
1
2
)
=
−
6
z
e
2
z
+
1
5
(
sin
z
1
−
D
1
2
+
cos
z
1
−
D
1
2
)
=
−
6
z
e
2
z
+
1
10
(
sin
z
+
cos
z
)
P
.
I
:
6
e
2
z
+
sin
z
(
D
1
−
2
)
(
D
1
−
3
)
=
6
e
2
z
(
D
1
−
2
)
(
D
1
−
3
)
+
sin
z
D
1
2
−
5
D
1
+
6
=
−
6
e
2
z
D
1
−
2
+
sin
z
−
1
+
6
−
5
D
=
−
6
e
2
z
z
1
!
+
sin
z
5
(
1
−
D
1
)
=
−
6
z
e
2
z
+
(
1
+
D
1
)
sin
z
5
(
1
−
D
1
)
(
1
+
D
1
)
=
−
6
z
e
2
z
+
sin
z
+
cos
z
5
(
1
−
D
1
2
)
=
−
6
z
e
2
z
+
1
5
sin
z
1
−
D
1
2
+
cos
z
1
−
D
1
2
=
−
6
z
e
2
z
+
1
10
(
sin
z
+
cos
z
)
{:[P.I:(6e^(2z)+sin z)/((D_(1)-2)(D_(1)-3))],[=(6e^(2z))/((D_(1)-2)(D_(1)-3))+(sin z)/(D_(1)^(2)-5D_(1)+6)],[=-(6e^(2z))/(D_(1)-2)+(sin z)/(-1+6-5D)],[=-6e^(2z)(z)/(1!)+(sin z)/(5(1-D_(1)))],[=-6ze^(2z)+((1+D_(1))sin z)/(5(1-D_(1))(1+D_(1)))],[=-6ze^(2z)+(sin z+cos z)/(5(1-D_(1)^(2)))],[=-6ze^(2z)+(1)/(5)((sin z)/(1-D_(1)^(2))+(cos z)/(1-D_(1)^(2)))],[=-6ze^(2z)+(1)/(10)(sin z+cos z)]:} \begin{aligned}
& P.I: \frac{6e^{2z}+\sin z}{(D_1-2)(D_1-3)} \\
& =\frac{6e^{2z}}{(D_1-2)(D_1-3)}+\frac{\sin z}{D_1^2-5D_1+6} \\
& =-\frac{6e^{2z}}{D_1-2}+\frac{\sin z}{-1+6-5D} \\
& =-6e^{2z}\frac{z}{1!}+\frac{\sin z}{5(1-D_1)} \\
& =-6ze^{2z}+\frac{(1+D_1)\sin z}{5(1-D_1)(1+D_1)} \\
& =-6ze^{2z}+\frac{\sin z+\cos z}{5(1-D_1^2)} \\
& =-6ze^{2z}+\frac{1}{5}\left(\frac{\sin z}{1-D_1^2}+\frac{\cos z}{1-D_1^2}\right) \\
& =-6ze^{2z}+\frac{1}{10}(\sin z+\cos z)
\end{aligned} P . I : 6 e 2 z + sin z ( D 1 − 2 ) ( D 1 − 3 ) = 6 e 2 z ( D 1 − 2 ) ( D 1 − 3 ) + sin z D 1 2 − 5 D 1 + 6 = − 6 e 2 z D 1 − 2 + sin z − 1 + 6 − 5 D = − 6 e 2 z z 1 ! + sin z 5 ( 1 − D 1 ) = − 6 z e 2 z + ( 1 + D 1 ) sin z 5 ( 1 − D 1 ) ( 1 + D 1 ) = − 6 z e 2 z + sin z + cos z 5 ( 1 − D 1 2 ) = − 6 z e 2 z + 1 5 ( sin z 1 − D 1 2 + cos z 1 − D 1 2 ) = − 6 z e 2 z + 1 10 ( sin z + cos z )
P
.
I
=
−
6
[
log
(
1
+
x
)
]
(
1
+
x
2
)
+
1
10
[
cos
log
(
1
+
x
)
+
sin
log
(
1
+
x
)
]
P
.
I
=
−
6
[
log
(
1
+
x
)
]
(
1
+
x
2
)
+
1
10
[
cos
log
(
1
+
x
)
+
sin
log
(
1
+
x
)
]
P.I=-6[log(1+x)](1+x^(2))+(1)/(10)[cos log(1+x)+sin log(1+x)] P.I=-6[\log (1+x)](1+x^2)+\frac{1}{10}[\cos \log (1+x)+\sin \log (1+x)] P . I = − 6 [ log ( 1 + x ) ] ( 1 + x 2 ) + 1 10 [ cos log ( 1 + x ) + sin log ( 1 + x ) ] Step 4: General Solution
So, the general solution is:
y
=
C
1
(
x
+
1
)
2
+
C
2
(
x
+
1
)
3
−
6
(
1
+
x
)
2
(
log
(
1
+
x
)
)
+
1
10
[
cos
log
(
1
+
x
)
+
sin
log
(
1
+
x
)
]
y
=
C
1
(
x
+
1
)
2
+
C
2
(
x
+
1
)
3
−
6
(
1
+
x
)
2
(
log
(
1
+
x
)
)
+
1
10
[
cos
log
(
1
+
x
)
+
sin
log
(
1
+
x
)
]
y=C_(1)(x+1)^(2)+C_(2)(x+1)^(3)-6(1+x)^(2)(log(1+x))+(1)/(10)[cos log(1+x)+sin log(1+x)] y=C_1(x+1)^2+C_2(x+1)^3-6(1+x)^2(\log (1+x))+\frac{1}{10}[\cos \log (1+x)+\sin \log (1+x)] y = C 1 ( x + 1 ) 2 + C 2 ( x + 1 ) 3 − 6 ( 1 + x ) 2 ( log ( 1 + x ) ) + 1 10 [ cos log ( 1 + x ) + sin log ( 1 + x ) ] (ii) Find the general and singular solutions of the differential equation
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9p^(2)(2-y)^(2)=4(3-y) 9 p^2(2-y)^2=4(3-y) 9 p 2 ( 2 − y ) 2 = 4 ( 3 − y ) , where
p
=
d
y
d
x
p
=
d
y
d
x
p=(dy)/(dx) p=\frac{d y}{d x} p = d y d x Answer:
Finding the General Solution
Given the differential equation:
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9
p
2
(
2
−
y
)
2
=
4
(
3
−
y
)
9p^(2)(2-y)^(2)=4(3-y) 9p^2(2-y)^2 = 4(3-y) 9 p 2 ( 2 − y ) 2 = 4 ( 3 − y ) where
p
=
d
y
d
x
p
=
d
y
d
x
p=(dy)/(dx) p = \frac{dy}{dx} p = d y d x .
Step 1: Solving for
p
p
p p p Solving for
p
p
p p p , we have:
p
=
±
2
3
(
(
3
−
y
)
1
2
2
−
y
)
p
=
±
2
3
(
3
−
y
)
1
2
2
−
y
p=+-(2)/(3)(((3-y)^((1)/(2)))/(2-y)) p = \pm \frac{2}{3}\left(\frac{(3-y)^{\frac{1}{2}}}{2-y}\right) p = ± 2 3 ( ( 3 − y ) 1 2 2 − y ) Step 2: Separation of Variables
Separating variables, we get:
d
x
=
±
3
2
2
−
y
(
3
−
y
)
1
2
d
y
d
x
=
±
3
2
2
−
y
(
3
−
y
)
1
2
d
y
dx=+-(3)/(2)(2-y)/((3-y)^((1)/(2)))dy dx = \pm \frac{3}{2}\frac{2-y}{(3-y)^{\frac{1}{2}}}dy d x = ± 3 2 2 − y ( 3 − y ) 1 2 d y Step 3: Integrating
Integrating both sides:
x
+
c
=
±
3
2
∫
[
(
3
−
y
)
1
2
−
(
3
−
y
)
1
2
]
d
y
x
+
c
=
±
3
2
∫
(
3
−
y
)
1
2
−
(
3
−
y
)
1
2
d
y
x+c=+-(3)/(2)int[(3-y)^((1)/(2))-(3-y)^((1)/(2))]dy x + c = \pm \frac{3}{2}\int \left[(3-y)^{\frac{1}{2}} – (3-y)^{\frac{1}{2}}\right]dy x + c = ± 3 2 ∫ [ ( 3 − y ) 1 2 − ( 3 − y ) 1 2 ] d y
x
+
c
=
±
(
3
2
)
[
−
2
3
(
3
−
y
)
1
2
+
2
(
3
−
y
)
1
2
]
x
+
c
=
±
3
2
−
2
3
(
3
−
y
)
1
2
+
2
(
3
−
y
)
1
2
x+c=+-((3)/(2))[-(2)/(3)(3-y)^((1)/(2))+2(3-y)^((1)/(2))] x + c = \pm \left(\frac{3}{2}\right)\left[-\frac{2}{3}(3-y)^{\frac{1}{2}} + 2(3-y)^{\frac{1}{2}}\right] x + c = ± ( 3 2 ) [ − 2 3 ( 3 − y ) 1 2 + 2 ( 3 − y ) 1 2 ]
x
+
c
=
±
(
3
−
y
)
1
2
[
−
(
3
−
y
)
+
3
]
x
+
c
=
±
(
3
−
y
)
1
2
[
−
(
3
−
y
)
+
3
]
x+c=+-(3-y)^((1)/(2))[-(3-y)+3] x + c = \pm(3-y)^{\frac{1}{2}}[-(3-y) + 3] x + c = ± ( 3 − y ) 1 2 [ − ( 3 − y ) + 3 ]
x
+
c
=
±
y
(
3
−
y
)
1
2
x
+
c
=
±
y
(
3
−
y
)
1
2
x+c=+-y(3-y)^((1)/(2)) x + c = \pm y(3-y)^{\frac{1}{2}} x + c = ± y ( 3 − y ) 1 2 or,
(
x
+
c
)
2
=
y
2
(
3
−
y
)
(
x
+
c
)
2
=
y
2
(
3
−
y
)
(x+c)^(2)=y^(2)(3-y) (x + c)^2 = y^2(3-y) ( x + c ) 2 = y 2 ( 3 − y ) (on squaring)
This is the general solution.
Finding the Singular Solution
Now, let’s find the singular solution:
The general solution is
(
x
+
c
)
2
=
y
2
(
3
−
y
)
(
x
+
c
)
2
=
y
2
(
3
−
y
)
(x+c)^(2)=y^(2)(3-y) (x + c)^2 = y^2(3-y) ( x + c ) 2 = y 2 ( 3 − y ) .
c
2
+
2
x
c
+
(
x
2
−
y
2
(
3
−
y
)
)
=
0
c
2
+
2
x
c
+
(
x
2
−
y
2
(
3
−
y
)
)
=
0
c^(2)+2xc+(x^(2)-y^(2)(3-y))=0 c^2 + 2xc + (x^2 – y^2(3-y)) = 0 c 2 + 2 x c + ( x 2 − y 2 ( 3 − y ) ) = 0 This is a quadratic equation in the parameter
c
c
c c c , so the discriminant relation is
B
2
−
4
A
C
=
0
B
2
−
4
A
C
=
0
B^(2)-4AC=0 B^2 – 4AC = 0 B 2 − 4 A C = 0 .
4
x
2
−
4
(
1
)
(
x
2
−
y
2
(
3
−
y
)
)
=
0
4
x
2
−
4
(
1
)
(
x
2
−
y
2
(
3
−
y
)
)
=
0
4x^(2)-4(1)(x^(2)-y^(2)(3-y))=0 4x^2 – 4(1)(x^2 – y^2(3-y)) = 0 4 x 2 − 4 ( 1 ) ( x 2 − y 2 ( 3 − y ) ) = 0
y
2
(
3
−
y
)
=
0
y
2
(
3
−
y
)
=
0
y^(2)(3-y)=0 y^2(3-y) = 0 y 2 ( 3 − y ) = 0 Now, two possibilities arise:
For
y
=
0
y
=
0
y=0 y = 0 y = 0 , we get
d
y
d
x
=
p
=
0
d
y
d
x
=
p
=
0
(dy)/(dx)=p=0 \frac{dy}{dx} = p = 0 d y d x = p = 0 .
Substituting
y
=
0
y
=
0
y=0 y = 0 y = 0 and
p
=
0
p
=
0
p=0 p = 0 p = 0 into the given differential equation, it does not satisfy it. Therefore,
y
=
0
y
=
0
y=0 y = 0 y = 0 is not a singular solution.
3
−
y
=
0
3
−
y
=
0
3-y=0 3-y = 0 3 − y = 0 :
For
3
−
y
=
0
3
−
y
=
0
3-y=0 3-y = 0 3 − y = 0 , we get
d
y
d
x
=
p
=
0
d
y
d
x
=
p
=
0
(dy)/(dx)=p=0 \frac{dy}{dx} = p = 0 d y d x = p = 0 .
Substituting
y
=
3
y
=
3
y=3 y = 3 y = 3 and
p
=
0
p
=
0
p=0 p = 0 p = 0 into the given differential equation, it satisfies it.
Therefore,
y
=
3
y
=
3
y=3 y = 3 y = 3 is the required singular solution.
(b) पृष्ठ समाकल
∬
S
∇
×
F
¯
⋅
n
^
d
S
∬
S
∇
×
F
¯
⋅
n
^
d
S
∬_(S)grad xx bar(F)* hat(n)dS \iint_S \nabla \times \bar{F} \cdot \hat{n} d S ∬ S ∇ × F ¯ ⋅ n ^ d S का मान निकालिए, जहाँ
F
¯
=
y
i
^
+
(
x
−
2
x
)
j
^
−
x
y
k
^
F
¯
=
y
i
^
+
(
x
−
2
x
)
j
^
−
x
y
k
^
bar(F)=y hat(i)+(x-2x) hat(j)-xy hat(k) \bar{F}=y \hat{i}+(x-2 x) \hat{j}-x y \hat{k} F ¯ = y i ^ + ( x − 2 x ) j ^ − x y k ^ तथा
S
S
S S S गोले
x
2
+
y
2
+
z
2
=
a
2
x
2
+
y
2
+
z
2
=
a
2
x^(2)+y^(2)+z^(2)=a^(2) x^2+y^2+z^2=a^2 x 2 + y 2 + z 2 = a 2 की सतह है, जो
x
y
x
y
xy x y x y -तल के ऊपर है।
Evaluate the surface integral
∬
S
∇
×
F
¯
⋅
n
^
d
S
∬
S
∇
×
F
¯
⋅
n
^
d
S
∬_(S)grad xx bar(F)* hat(n)dS \iint_S \nabla \times \bar{F} \cdot \hat{n} d S ∬ S ∇ × F ¯ ⋅ n ^ d S for
F
¯
=
y
i
^
+
(
x
−
2
x
z
)
j
^
−
x
y
k
^
F
¯
=
y
i
^
+
(
x
−
2
x
z
)
j
^
−
x
y
k
^
bar(F)=y hat(i)+(x-2xz) hat(j)-xy hat(k) \bar{F}=y \hat{i}+(x-2 x z) \hat{j}-x y \hat{k} F ¯ = y i ^ + ( x − 2 x z ) j ^ − x y k ^ and
S
S
S S S is the surface of the sphere
x
2
+
y
2
+
z
2
=
a
2
x
2
+
y
2
+
z
2
=
a
2
x^(2)+y^(2)+z^(2)=a^(2) x^2+y^2+z^2=a^2 x 2 + y 2 + z 2 = a 2 above the
x
y
x
y
xy x y x y -plane.
Answer:
Step 1: Calculate the Curl of
F
→
F
→
vec(F) \vec{F} F → The curl
∇
×
F
→
∇
×
F
→
grad xx vec(F) \nabla \times \vec{F} ∇ × F → is given by:
∇
×
F
→
=
|
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
y
x
−
2
x
z
−
x
y
|
=
(
∂
(
−
x
y
)
∂
y
−
∂
(
x
−
2
x
z
)
∂
z
)
i
^
+
(
∂
y
∂
z
−
∂
(
−
x
y
)
∂
x
)
j
^
+
(
∂
(
x
−
2
x
z
)
∂
x
−
∂
y
∂
y
)
k
^
=
(
−
x
−
(
−
2
x
)
)
i
^
+
(
0
−
(
−
y
)
)
j
^
+
(
1
−
2
z
−
1
)
k
^
=
x
i
^
+
y
j
^
−
2
z
k
^
∇
×
F
→
=
i
^
j
^
k
^
∂
∂
x
∂
∂
y
∂
∂
z
y
x
−
2
x
z
−
x
y
=
∂
(
−
x
y
)
∂
y
−
∂
(
x
−
2
x
z
)
∂
z
i
^
+
∂
y
∂
z
−
∂
(
−
x
y
)
∂
x
j
^
+
∂
(
x
−
2
x
z
)
∂
x
−
∂
y
∂
y
k
^
=
(
−
x
−
(
−
2
x
)
)
i
^
+
(
0
−
(
−
y
)
)
j
^
+
(
1
−
2
z
−
1
)
k
^
=
x
i
^
+
y
j
^
−
2
z
k
^
{:[grad xx vec(F)=|[ hat(i), hat(j), hat(k)],[(del)/(del x),(del)/(del y),(del)/(del z)],[y,x-2xz,-xy]|],[=((del(-xy))/(del y)-(del(x-2xz))/(del z)) hat(i)+((del y)/(del z)-(del(-xy))/(del x)) hat(j)+((del(x-2xz))/(del x)-(del y)/(del y)) hat(k)],[=(-x-(-2x)) hat(i)+(0-(-y)) hat(j)+(1-2z-1) hat(k)],[=x hat(i)+y hat(j)-2z hat(k)]:} \begin{gathered}
\nabla \times \vec{F}=\left|\begin{array}{ccc}
\hat{i} & \hat{j} & \hat{k} \\
\frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\
y & x-2 x z & -x y
\end{array}\right| \\
=\left(\frac{\partial(-x y)}{\partial y}-\frac{\partial(x-2 x z)}{\partial z}\right) \hat{i}+\left(\frac{\partial y}{\partial z}-\frac{\partial(-x y)}{\partial x}\right) \hat{j}+\left(\frac{\partial(x-2 x z)}{\partial x}-\frac{\partial y}{\partial y}\right) \hat{k} \\
=(-x-(-2 x)) \hat{i}+(0-(-y)) \hat{j}+(1-2 z-1) \hat{k} \\
=x \hat{i}+y \hat{j}-2 z \hat{k}
\end{gathered} ∇ × F → = | i ^ j ^ k ^ ∂ ∂ x ∂ ∂ y ∂ ∂ z y x − 2 x z − x y | = ( ∂ ( − x y ) ∂ y − ∂ ( x − 2 x z ) ∂ z ) i ^ + ( ∂ y ∂ z − ∂ ( − x y ) ∂ x ) j ^ + ( ∂ ( x − 2 x z ) ∂ x − ∂ y ∂ y ) k ^ = ( − x − ( − 2 x ) ) i ^ + ( 0 − ( − y ) ) j ^ + ( 1 − 2 z − 1 ) k ^ = x i ^ + y j ^ − 2 z k ^
∇
×
F
→
=
(
x
i
^
+
y
j
^
−
2
z
k
^
)
∇
×
F
→
=
(
x
i
^
+
y
j
^
−
2
z
k
^
)
grad xx vec(F)=(x hat(i)+y hat(j)-2z hat(k)) \nabla \times \vec{F} = (x\hat{i} + y\hat{j} – 2z\hat{k}) ∇ × F → = ( x i ^ + y j ^ − 2 z k ^ ) Step 2: Set Up the Surface Integral The surface integral
∬
S
∇
×
F
→
⋅
n
^
d
S
∬
S
∇
×
F
→
⋅
n
^
d
S
∬_(S)grad xx vec(F)* hat(n)dS \iint_S \nabla \times \vec{F} \cdot \hat{n} \, dS ∬ S ∇ × F → ⋅ n ^ d S over the sphere
x
2
+
y
2
+
z
2
=
a
2
x
2
+
y
2
+
z
2
=
a
2
x^(2)+y^(2)+z^(2)=a^(2) x^2 + y^2 + z^2 = a^2 x 2 + y 2 + z 2 = a 2 above the
x
y
x
y
xy xy x y -plane can be evaluated using spherical coordinates:
x
=
a
sin
θ
cos
ϕ
,
y
=
a
sin
θ
sin
ϕ
,
z
=
a
cos
θ
x
=
a
sin
θ
cos
ϕ
,
y
=
a
sin
θ
sin
ϕ
,
z
=
a
cos
θ
x=a sin theta cos phi,quad y=a sin theta sin phi,quad z=a cos theta x = a \sin \theta \cos \phi, \quad y = a \sin \theta \sin \phi, \quad z = a \cos \theta x = a sin θ cos ϕ , y = a sin θ sin ϕ , z = a cos θ Here,
θ
θ
theta \theta θ ranges from
0
0
0 0 0 to
π
2
π
2
(pi)/(2) \frac{\pi}{2} π 2 and
ϕ
ϕ
phi \phi ϕ ranges from
0
0
0 0 0 to
2
π
2
π
2pi 2\pi 2 π .
The normal vector
n
^
n
^
hat(n) \hat{n} n ^ for the sphere is
k
^
k
^
hat(k) \hat{k} k ^ , and
d
S
=
a
2
sin
θ
d
θ
d
ϕ
d
S
=
a
2
sin
θ
d
θ
d
ϕ
dS=a^(2)sin thetad thetad phi dS = a^2 \sin \theta \, d\theta \, d\phi d S = a 2 sin θ d θ d ϕ .
Step 3: Evaluate the Surface Integral The surface integral becomes:
∬
S
∇
×
F
→
⋅
n
^
d
S
=
∫
0
2
π
∫
0
π
2
(
−
2
a
cos
θ
)
a
2
sin
θ
d
θ
d
ϕ
∬
S
∇
×
F
→
⋅
n
^
d
S
=
∫
0
2
π
∫
0
π
2
(
−
2
a
cos
θ
)
a
2
sin
θ
d
θ
d
ϕ
∬_(S)grad xx vec(F)* hat(n)dS=int_(0)^(2pi)int_(0)^((pi)/(2))(-2a cos theta)a^(2)sin thetad thetad phi \iint_S \nabla \times \vec{F} \cdot \hat{n} \, dS = \int_0^{2\pi} \int_0^{\frac{\pi}{2}} (-2a \cos \theta) \, a^2 \sin \theta \, d\theta \, d\phi ∬ S ∇ × F → ⋅ n ^ d S = ∫ 0 2 π ∫ 0 π 2 ( − 2 a cos θ ) a 2 sin θ d θ d ϕ
=
−
2
a
3
[
∫
0
2
π
d
ϕ
]
[
∫
0
π
2
cos
θ
sin
θ
d
θ
]
=
−
2
a
3
∫
0
2
π
d
ϕ
∫
0
π
2
cos
θ
sin
θ
d
θ
=-2a^(3)[int_(0)^(2pi)d phi][int_(0)^((pi)/(2))cos theta sin thetad theta] = -2a^3 \left[ \int_0^{2\pi} d\phi \right] \left[ \int_0^{\frac{\pi}{2}} \cos \theta \sin \theta \, d\theta \right] = − 2 a 3 [ ∫ 0 2 π d ϕ ] [ ∫ 0 π 2 cos θ sin θ d θ ]
=
−
2
a
3
[
2
π
]
[
1
2
]
=
−
2
π
a
3
=
−
2
a
3
[
2
π
]
1
2
=
−
2
π
a
3
=-2a^(3)[2pi][(1)/(2)]=-2pia^(3) = -2a^3 [2\pi] \left[ \frac{1}{2} \right] = -2\pi a^3 = − 2 a 3 [ 2 π ] [ 1 2 ] = − 2 π a 3 Final Answer So, the value of the surface integral
∬
S
∇
×
F
→
⋅
n
^
d
S
∬
S
∇
×
F
→
⋅
n
^
d
S
∬_(S)grad xx vec(F)* hat(n)dS \iint_S \nabla \times \vec{F} \cdot \hat{n} \, dS ∬ S ∇ × F → ⋅ n ^ d S is
−
2
π
a
3
−
2
π
a
3
-2pia^(3) -2\pi a^3 − 2 π a 3 .
(c) एक चार पहियों वाला रेलवे ट्रक, जिसका कुल द्रव्यमान
M
M
M M M है, के पहिए और धुरी के हर युग्म का द्रव्यमान व परिभ्रमण त्रिज्या क्रमशः
m
m
m m m तथा
k
k
k k k है। हर पहिए की त्रिज्या
r
r
r r r है। यदि ट्रक को बल
P
P
P P P द्वारा सीधे पथ (ट्रैक) पर धकेला जाता है, तब सिद्ध कीजिए कि उसका त्वरण
P
M
+
2
m
k
2
r
2
P
M
+
2
m
k
2
r
2
(P)/(M+(2mk^(2))/(r^(2))) \frac{P}{M+\frac{2 m k^2}{r^2}} P M + 2 m k 2 r 2 है तथा ट्रक द्वारा प्रत्येक धुरी पर लगाए गए क्षैतिज बल का मान ज्ञात कीजिए। धुरी घर्षण व हवा का प्रतिरोध नगण्य है।
A four-wheeled railway truck has a total mass
M
M
M M M , the mass and radius of gyration of each pair of wheels and axle are
m
m
m m m and
k
k
k k k respectively, and the radius of each wheel is
r
r
r r r . Prove that if the truck is propelled along a level track by a force
P
P
P P P , the acceleration is
P
M
+
2
m
k
2
r
2
P
M
+
2
m
k
2
r
2
(P)/(M+(2mk^(2))/(r^(2))) \frac{P}{M+\frac{2 m k^2}{r^2}} P M + 2 m k 2 r 2 , and find the horizontal force exerted on each axle by the truck. The axle friction and wind resistance are to be neglected.
Answer:
Proving the Acceleration
Given the parameters:
Total mass of the railway truck
M
M
M M M Mass and radius of gyration of each pair of wheels and axle
m
m
m m m
k
k
k k k Radius of each wheel
r
r
r r r Propelling force
P
P
P P P We want to prove that if the truck is propelled along a level track by a force
P
P
P P P , the acceleration
a
a
a a a is given by:
a
=
P
M
+
2
m
k
2
r
2
a
=
P
M
+
2
m
k
2
r
2
a=(P)/(M+(2mk^(2))/(r^(2))) a = \frac{P}{M + \frac{2mk^2}{r^2}} a = P M + 2 m k 2 r 2 Step 1: Work Done and Kinetic Energy
Let the distance covered be
x
x
x x x , acceleration
a
a
a a a , and velocity
V
V
V V V .
Work done at the application of force
F
=
P
x
F
=
P
x
F=Px F = Px F = P x .
The kinetic energy (KE) of the truck is given by
1
2
M
V
2
1
2
M
V
2
(1)/(2)MV^(2) \frac{1}{2}MV^2 1 2 M V 2 .
The KE of rotation for the wheels is
1
2
I
w
2
×
2
1
2
I
w
2
×
2
(1)/(2)Iw^(2)xx2 \frac{1}{2}Iw^2 \times 2 1 2 I w 2 × 2 (There are 2 points of rotation).
KE of rotation
=
I
w
2
=
m
K
2
V
2
r
2
KE of rotation
=
I
w
2
=
m
K
2
V
2
r
2
“KE of rotation”=Iw^(2)=(mK^(2)V^(2))/(r^(2)) \text{KE of rotation} = Iw^2 = \frac{mK^2V^2}{r^2} KE of rotation = I w 2 = m K 2 V 2 r 2 Therefore, work done
P
x
P
x
Px Px P x equals the sum of KE of the truck and KE of the wheels:
P
x
=
1
2
M
V
2
+
m
K
2
V
2
r
2
=
V
2
2
(
M
r
2
+
2
m
K
2
r
2
)
P
x
=
1
2
M
V
2
+
m
K
2
V
2
r
2
=
V
2
2
M
r
2
+
2
m
K
2
r
2
Px=(1)/(2)MV^(2)+(mK^(2)V^(2))/(r^(2))=(V^(2))/(2)((Mr^(2)+2mK^(2))/(r^(2))) Px = \frac{1}{2}MV^2 + \frac{mK^2V^2}{r^2} = \frac{V^2}{2}\left(\frac{Mr^2 + 2mK^2}{r^2}\right) P x = 1 2 M V 2 + m K 2 V 2 r 2 = V 2 2 ( M r 2 + 2 m K 2 r 2 ) Step 2: Relationship between Velocity and Acceleration
We know that
u
=
0
u
=
0
u=0 u = 0 u = 0 and
V
2
=
2
a
x
V
2
=
2
a
x
V^(2)=2ax V^2 = 2ax V 2 = 2 a x .
Therefore,
P
x
=
2
a
x
2
(
M
+
2
m
K
2
r
2
)
P
x
=
2
a
x
2
M
+
2
m
K
2
r
2
Px=(2ax)/(2)(M+(2mK^(2))/(r^(2))) Px = \frac{2ax}{2}\left(M + \frac{2mK^2}{r^2}\right) P x = 2 a x 2 ( M + 2 m K 2 r 2 ) Simplifying,
P
x
=
a
x
(
M
+
2
m
K
2
r
2
)
P
x
=
a
x
M
+
2
m
K
2
r
2
Px=ax(M+(2mK^(2))/(r^(2))) Px = ax\left(M + \frac{2mK^2}{r^2}\right) P x = a x ( M + 2 m K 2 r 2 ) Step 3: Finding Acceleration
Now, let’s isolate
a
a
a a a :
a
=
P
x
x
(
M
+
2
m
K
2
r
2
)
a
=
P
x
x
M
+
2
m
K
2
r
2
a=(Px)/(x(M+(2mK^(2))/(r^(2)))) a = \frac{Px}{x\left(M + \frac{2mK^2}{r^2}\right)} a = P x x ( M + 2 m K 2 r 2 )
a
=
P
M
+
2
m
K
2
r
2
a
=
P
M
+
2
m
K
2
r
2
a=(P)/(M+(2mK^(2))/(r^(2))) a = \frac{P}{M + \frac{2mK^2}{r^2}} a = P M + 2 m K 2 r 2 This proves the given acceleration formula.
Finding the Horizontal Force on Each Axle
The horizontal force (
F
x
F
x
F_(x) F_x F x ) exerted on each axle by the truck can be calculated as follows:
F
x
=
1
2
m
V
2
+
1
2
m
V
2
(
K
2
r
2
)
=
m
V
2
2
(
1
+
K
2
r
2
)
F
x
=
1
2
m
V
2
+
1
2
m
V
2
K
2
r
2
=
m
V
2
2
1
+
K
2
r
2
F_(x)=(1)/(2)mV^(2)+(1)/(2)mV^(2)((K^(2))/(r^(2)))=(mV^(2))/(2)(1+(K^(2))/(r^(2))) F_x = \frac{1}{2}mV^2 + \frac{1}{2}mV^2\left(\frac{K^2}{r^2}\right) = \frac{mV^2}{2}\left(1 + \frac{K^2}{r^2}\right) F x = 1 2 m V 2 + 1 2 m V 2 ( K 2 r 2 ) = m V 2 2 ( 1 + K 2 r 2 ) Using
V
2
=
2
a
x
V
2
=
2
a
x
V^(2)=2ax V^2 = 2ax V 2 = 2 a x , we have:
F
x
=
m
(
2
a
x
)
2
(
1
+
K
2
r
2
)
=
m
a
x
2
(
1
+
K
2
r
2
)
F
x
=
m
(
2
a
x
)
2
1
+
K
2
r
2
=
m
a
x
2
1
+
K
2
r
2
F_(x)=(m(2ax))/(2)(1+(K^(2))/(r^(2)))=(max)/(2)(1+(K^(2))/(r^(2))) F_x = \frac{m(2ax)}{2}\left(1 + \frac{K^2}{r^2}\right) = \frac{max}{2}\left(1 + \frac{K^2}{r^2}\right) F x = m ( 2 a x ) 2 ( 1 + K 2 r 2 ) = m a x 2 ( 1 + K 2 r 2 ) Substituting the value of
a
a
a a a from the acceleration formula:
F
x
=
m
(
P
M
+
2
m
K
2
r
2
)
2
(
1
+
K
2
r
2
)
F
x
=
m
P
M
+
2
m
K
2
r
2
2
1
+
K
2
r
2
F_(x)=(m((P)/(M+(2mK^(2))/(r^(2)))))/(2)(1+(K^(2))/(r^(2))) F_x = \frac{m\left(\frac{P}{M + \frac{2mK^2}{r^2}}\right)}{2}\left(1 + \frac{K^2}{r^2}\right) F x = m ( P M + 2 m K 2 r 2 ) 2 ( 1 + K 2 r 2 ) Simplifying further:
F
x
=
m
P
2
(
M
+
2
m
K
2
r
2
)
(
1
+
K
2
r
2
)
F
x
=
m
P
2
M
+
2
m
K
2
r
2
1
+
K
2
r
2
F_(x)=(mP)/(2(M+(2mK^(2))/(r^(2))))(1+(K^(2))/(r^(2))) F_x = \frac{mP}{2\left(M + \frac{2mK^2}{r^2}\right)}\left(1 + \frac{K^2}{r^2}\right) F x = m P 2 ( M + 2 m K 2 r 2 ) ( 1 + K 2 r 2 ) So, the horizontal force exerted on each axle by the truck is given by the above expression.